- Aims & Scopes
- Editorial Board
- Young Academic Editors
- Subscription
- Online First
- Current Issue
- Most Downloaded
- Advance Search
- Submission & Review
- Guide for Authors
- Publishing Process
- Publishing Ethics
- Peer View Process
- Article Publish Charge
- Submission Template


Small-scale self-driving cars: A systematic literature review
- Felipe Caleffi ,
- Lauren da Silva Rodrigues ,
- Joice da Silva Stamboroski ,
- Brenda Medeiros Pereira
Export File
You can copy and paste references from this page.
Thank you for visiting nature.com. You are using a browser version with limited support for CSS. To obtain the best experience, we recommend you use a more up to date browser (or turn off compatibility mode in Internet Explorer). In the meantime, to ensure continued support, we are displaying the site without styles and JavaScript.
- View all journals
- Explore content
- About the journal
- Publish with us
- Sign up for alerts
- Published: 23 February 2023
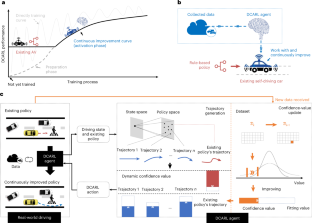
Continuous improvement of self-driving cars using dynamic confidence-aware reinforcement learning
- Zhong Cao ORCID: orcid.org/0000-0002-2243-5705 1 ,
- Kun Jiang 1 ,
- Weitao Zhou ORCID: orcid.org/0000-0002-1266-3843 1 ,
- Shaobing Xu 1 ,
- Huei Peng 2 &
- Diange Yang ORCID: orcid.org/0000-0003-0825-5609 1
Nature Machine Intelligence volume 5 , pages 145–158 ( 2023 ) Cite this article
4268 Accesses
14 Citations
30 Altmetric
Metrics details
- Mechanical engineering
Today’s self-driving vehicles have achieved impressive driving capabilities, but still suffer from uncertain performance in long-tail cases. Training a reinforcement-learning-based self-driving algorithm with more data does not always lead to better performance, which is a safety concern. Here we present a dynamic confidence-aware reinforcement learning (DCARL) technology for guaranteed continuous improvement. Continuously improving means that more training always improves or maintains its current performance. Our technique enables performance improvement using the data collected during driving, and does not need a lengthy pre-training phase. We evaluate the proposed technology both using simulations and on an experimental vehicle. The results show that the proposed DCARL method enables continuous improvement in various cases, and, in the meantime, matches or outperforms the default self-driving policy at any stage. This technology was demonstrated and evaluated on the vehicle at the 2022 Beijing Winter Olympic Games.
This is a preview of subscription content, access via your institution
Access options
Access Nature and 54 other Nature Portfolio journals
Get Nature+, our best-value online-access subscription
24,99 € / 30 days
cancel any time
Subscribe to this journal
Receive 12 digital issues and online access to articles
111,21 € per year
only 9,27 € per issue
Buy this article
- Purchase on Springer Link
- Instant access to full article PDF
Prices may be subject to local taxes which are calculated during checkout
Similar content being viewed by others

Highly accurate protein structure prediction with AlphaFold

OpenFold: retraining AlphaFold2 yields new insights into its learning mechanisms and capacity for generalization

The role of artificial intelligence in achieving the Sustainable Development Goals
Data availability.
The Supplementary Software file contains the minimum data to run and render the results for all three experiments. These data are also available in a public repository at https://github.com/zhcao92/DCARL (ref. 37 ).
Code availability
The source code of the self-driving experiments is available at https://github.com/zhcao92/DCARL (ref. 38 ). It contains the proposed DCARL planning algorithms as well as the used perception, localization and control algorithms in our self-driving cars.
Sutton, R. S. & Barto, A. G. Reinforcement Learning: An Introduction (MIT Press, 2018).
Silver, D. et al. A general reinforcement learning algorithm that masters chess, shogi, and Go through self-play. Science 362 , 1140–1144 (2018).
Article MATH MathSciNet Google Scholar
Silver, D. et al. Mastering the game of Go with deep neural networks and tree search. Nature 529 , 484–489 (2016).
Article Google Scholar
Mnih, V. et al. Human-level control through deep reinforcement learning. Nature 518 , 529–533 (2015).
Ye, F., Zhang, S., Wang, P. & Chan, C.-Y. A survey of deep reinforcement learning algorithms for motion planning and control of autonomous vehicles. In 2021 IEEE Intelligent Vehicles Symposium (IV) 1073–1080 (IEEE, 2021).
Zhu, Z. & Zhao, H. A survey of deep RL and IL for autonomous driving policy learning. IEEE Trans. Intell. Transp. Syst. 23 , 14043–14065 (2022).
Aradi, S. Survey of deep reinforcement learning for motion planning of autonomous vehicles. IEEE Trans. Intell. Transp. Syst. 23 , 740–759 (2022).
Cao, Z. et al. Highway exiting planner for automated vehicles using reinforcement learning. IEEE Trans. Intell. Transp. Syst. 22 , 990–1000 (2020).
Stilgoe, J. Self-driving cars will take a while to get right. Nat. Mach. Intell. 1 , 202–203 (2019).
Kalra, N. & Paddock, S. M. Driving to safety: How many miles of driving would it take to demonstrate autonomous vehicle reliability? Transp. Res. Part A 94 , 182–193 (2016).
Google Scholar
Disengagement reports. California DMV https://www.dmv.ca.gov/portal/vehicle-industry-services/autonomous-vehicles/disengagement-reports/ (2021).
Li, G. et al. Decision making of autonomous vehicles in lane change scenarios: deep reinforcement learning approaches with risk awareness. Transp. Res. Part C 134 , 103452 (2022).
Shu, H., Liu, T., Mu, X. & Cao, D. Driving tasks transfer using deep reinforcement learning for decision-making of autonomous vehicles in unsignalized intersection. IEEE Trans. Veh. Technol. 71 , 41–52 (2021).
Pek, C., Manzinger, S., Koschi, M. & Althoff, M. Using online verification to prevent autonomous vehicles from causing accidents. Nat. Mach. Intell. 2 , 518–528 (2020).
Xu, S., Peng, H., Lu, P., Zhu, M. & Tang, Y. Design and experiments of safeguard protected preview lane keeping control for autonomous vehicles. IEEE Access 8 , 29944–29953 (2020).
Yang, J., Zhang, J., Xi, M., Lei, Y. & Sun, Y. A deep reinforcement learning algorithm suitable for autonomous vehicles: double bootstrapped soft-actor-critic-discrete. IEEE Trans. Cogn. Dev. Syst. https://doi.org/10.1109/TCDS.2021.3092715 (2021).
Schwall, M., Daniel, T., Victor, T., Favaro, F. & Hohnhold, H. Waymo public road safety performance data. Preprint at arXiv https://doi.org/10.48550/arXiv.2011.00038 (2020).
Fan, H. et al. Baidu Apollo EM motion planner. Preprint at arXiv https://doi.org/10.48550/arXiv.1807.08048 (2018).
Kato, S. et al. Autoware on board: enabling autonomous vehicles with embedded systems. In 2018 ACM/IEEE 9th International Conference on Cyber-Physical Systems 287–296 (IEEE, 2018).
Cao, Z., Xu, S., Peng, H., Yang, D. & Zidek, R. Confidence-aware reinforcement learning for self-driving cars. IEEE Trans. Intell. Transp. Syst. 23 , 7419–7430 (2022).
Thomas, P. S. et al. Preventing undesirable behavior of intelligent machines. Science 366 , 999–1004 (2019).
Levine, S., Kumar, A., Tucker, G. & Fu, J. Offline reinforcement learning: tutorial, review, and perspectives on open problems. Preprint at arXiv https://doi.org/10.48550/arXiv.2005.01643 (2020).
Garcıa, J. & Fernández, F. A comprehensive survey on safe reinforcement learning. J. Mach. Learn. Res. 16 , 1437–1480 (2015).
MATH MathSciNet Google Scholar
Achiam, J., Held, D., Tamar, A. & Abbeel, P. Constrained policy optimization. In International Conference on Machine Learning 22–31 (JMLR, 2017).
Berkenkamp, F., Turchetta, M., Schoellig, A. & Krause, A. Safe model-based reinforcement learning with stability guarantees. Adv. Neural Inf. Process. Syst . 30 , 908-919 (2017).
Ghadirzadeh, A., Maki, A., Kragic, D. & Björkman, M. Deep predictive policy training using reinforcement learning. In 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems 2351–2358 (IEEE, 2017).
Abbeel, P. & Ng, A. Y. Apprenticeship learning via inverse reinforcement learning. In Proc. Twenty-first International Conference on Machine Learning , 1 (Association for Computing Machinery, 2004).
Abbeel, P. & Ng, A. Y. Exploration and apprenticeship learning in reinforcement learning. In Proc. 22nd International Conference on Machine Learning 1–8 (Association for Computing Machinery, 2005).
Ross, S., Gordon, G. & Bagnell, D. A reduction of imitation learning and structured prediction to no-regret online learning. In Gordon, G., Dunson, D. & Dudík, M. (eds) Proc. Fourteenth International Conference on Artificial Intelligence and Statistics , 627–635 (JMLR, 2011).
Zhang, J. & Cho, K. Query-efficient imitation learning for end-to-end autonomous driving. In Thirty-First AAAI Conference on Artificial Intelligence (AAAI) , 2891–2897 (AAAI Press, 2017).
Bicer, Y., Alizadeh, A., Ure, N. K., Erdogan, A. & Kizilirmak, O. Sample efficient interactive end-to-end deep learning for self-driving cars with selective multi-class safe dataset aggregation. In 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems 2629–2634 (IEEE, 2019).
Alshiekh, M. et al Safe reinforcement learning via shielding. In Proc. Thirty-Second AAAI Conference on Artificial Intelligence Vol. 32, 2669-2678 (AAAI Press, 2018).
Brun, W., Keren, G., Kirkeboen, G. & Montgomery, H. Perspectives on Thinking, Judging, and Decision Making (Universitetsforlaget, 2011).
Dabney, W. et al. A distributional code for value in dopamine-based reinforcement learning. Nature 577 , 671–675 (2020).
Cao, Z. et al. A geometry-driven car-following distance estimation algorithm robust to road slopes. Transp. Res. Part C 102 , 274–288 (2019).
Xu, S. et al. System and experiments of model-driven motion planning and control for autonomous vehicles. IEEE Trans. Syst. Man. Cybern. Syst. 52 , 5975–5988 (2022).
Cao, Z. Codes and data for dynamic confidence-aware reinforcement learning. DCARL. Zenodo https://zenodo.org/badge/latestdoi/578512035 (2022).
Kochenderfer, M. J. Decision Making Under Uncertainty: Theory and Application (MIT Press, 2015).
Ivanovic, B. et al. Heterogeneous-agent trajectory forecasting incorporating class uncertainty. In 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , 12196–12203 (IEEE, 2022).
Yang, Y., Zha, K., Chen, Y., Wang, H. & Katabi, D. Delving into deep imbalanced regression. In International Conference on Machine Learning 11842–11851 (PMLR, 2021).
Efron, B. & Tibshirani, R. J. An Introduction to the Bootstrap (CRC Press, 1994).
Dosovitskiy, A., Ros, G., Codevilla, F., Lopez, A. & Koltun, V. CARLA: An open urban driving simulator. In Proceedings of the 1st Annual Conference on Robot Learning , 1–16 (PMLR, 2017).
Download references
Acknowledgements
This work is supported by the National Natural Science Foundation of China (NSFC) (U1864203 (D.Y.), 52102460 (Z.C.), 61903220 (K.J.)), China Postdoctoral Science Foundation (2021M701883 (Z.C.)) and Beijing Municipal Science and Technology Commission (Z221100008122011 (D.Y.)). It is also funded by the Tsinghua University-Toyota Joint Center (D.Y.).
Author information
Authors and affiliations.
School of Vehicle and Mobility, Tsinghua University, Beijing, China
Zhong Cao, Kun Jiang, Weitao Zhou, Shaobing Xu & Diange Yang
Mechanical Engineering, University of Michigan, Ann Arbor, MI, USA
You can also search for this author in PubMed Google Scholar
Contributions
Z.C., S.X., D.Y. and H.P. developed the performance improvement technique, which can outperform the existing self-driving policy. Z.C. and W.Z. developed the continuous improvement technique using the worst confidence value. Z.C., S.X. and W.Z. designed the whole self-driving platform in the real world. Z.C., K.J. and D.Y. designed and conducted the experiments and collected the data.
Corresponding author
Correspondence to Diange Yang .
Ethics declarations
Competing interests.
The authors declare no competing interests.
Peer review
Peer review information.
Nature Machine Intelligence thanks Ali Alizadeh and the other, anonymous, reviewer(s) for their contribution to the peer review of this work.
Additional information
Publisher’s note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary information
Supplementary information.
Essential supplementary description for the proposed technology, detailed setting and results for the experiments, descriptions of the data file and vehicles.
Supplementary Video 1
Evaluation results on running self-driving vehicle.
Supplementary Video 2
Continuous performance improvement using confidence value.
Supplementary Video 3
Comparing with classical value-based RL agent.
Supplementary Software
Software to run and render the results of experiments 1 to 3.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
Reprints and permissions
About this article
Cite this article.
Cao, Z., Jiang, K., Zhou, W. et al. Continuous improvement of self-driving cars using dynamic confidence-aware reinforcement learning. Nat Mach Intell 5 , 145–158 (2023). https://doi.org/10.1038/s42256-023-00610-y
Download citation
Received : 14 May 2022
Accepted : 04 January 2023
Published : 23 February 2023
Issue Date : February 2023
DOI : https://doi.org/10.1038/s42256-023-00610-y
Share this article
Anyone you share the following link with will be able to read this content:
Sorry, a shareable link is not currently available for this article.
Provided by the Springer Nature SharedIt content-sharing initiative
This article is cited by
Reinforcement learning-based energy management for hybrid power systems: state-of-the-art survey, review, and perspectives.
- Xiaolin Tang
- Jiaxin Chen
Chinese Journal of Mechanical Engineering (2024)
Stable training via elastic adaptive deep reinforcement learning for autonomous navigation of intelligent vehicles
- Yujiao Zhao
- Xinping Yan
Communications Engineering (2024)
Novel multiple access protocols against Q-learning-based tunnel monitoring using flying ad hoc networks
- Bakri Hossain Awaji
- M. M. Kamruzzaman
- Udayakumar Allimuthu
Wireless Networks (2023)
Quick links
- Explore articles by subject
- Guide to authors
- Editorial policies
Sign up for the Nature Briefing newsletter — what matters in science, free to your inbox daily.

Drivers of autonomous vehicles—analyzing consumer preferences for self-driving car brand extensions
- Open access
- Published: 13 May 2021
- Volume 33 , pages 89–112, ( 2022 )
Cite this article
You have full access to this open access article

- Felix Eggers ORCID: orcid.org/0000-0001-9753-1227 1 &
- Fabian Eggers 2
14k Accesses
11 Citations
2 Altmetric
Explore all metrics
Autonomous cars are considered to be the next disruptive innovation that will affect consumers. It can be expected that not only traditional automakers will enter this market (e.g., Ford) but also technology companies (e.g., Google) and newer companies dedicated to self-driving cars (e.g., Tesla). We take a brand extension perspective and analyze to what extent consumers prefer autonomous cars from these brand categories. Our empirical study is based on discrete choice experiments about adopting autonomous vehicles in a purchase scenario and in a renting context. Our findings show that brands play a central role when making autonomous driving decisions. Brand preferences differ systematically when buying versus renting a self-driving car. While technology brands are most preferred overall, consumers favor automaker brands over new brands only when purchasing, not when renting. We further disentangle the brand strength into the marginal effects of image associations. For example, Google’s strong brand positioning can be explained by experiences with the parent brand, but it could still improve brand strength by highlighting the relevance of the associated brand portfolio for self-driving cars. The effect of these brand extension success factors differs between parent-brand categories and also between the renting and purchasing scenarios, which requires a dedicated brand management.
Similar content being viewed by others
Autonomous vehicles: challenges, opportunities, and future implications for transportation policies.

The digital revolution in the travel and tourism industry

Business Model Design: Lessons Learned from Tesla Motors
Avoid common mistakes on your manuscript.
1 Introduction
Following the increasing adoption of electric vehicles (Eggers & Eggers, 2011 ), technology surrounding autonomous driving is progressing at a fast pace. Self-driving cars use artificial intelligence (AI) to navigate a car and require no or a minimum of user input. This disruptive innovation represents a potentially attractive new market for firms. However, it has been shown that consumers have reservations towards AI in general, particularly if it involves consequential tasks such as steering a car (Davenport et al., 2020 ). We take a branding perspective to analyze this new market as brands play a central role in increasing trust and reducing uncertainty for consumers. The effect of brands has not been analyzed yet in the literature surrounding AI research in general (Davenport et al., 2020 ), let alone autonomous vehicles (Gkartzonikas & Gkritza, 2019 ). In fact, any marketing-related findings about self-driving cars are scarce.
Firms frequently apply a brand extension strategy when entering new markets in order to leverage existing (parent) brand equity (Völckner & Sattler, 2006 ). Previous research about brand extensions focuses primarily on incremental innovations or extensions into a category with established incumbents. Not much research exists about brand extensions for radical innovations such as autonomous cars. One aspect that makes radical innovations special is that firms do not know with whom they need to compete as there are no incumbents. Brands may expect intense competition on the autonomous vehicle market because not only traditional automakers will enter the market (e.g., Ford) but also technology companies (e.g., Google) and newer companies with a specific focus on self-driving cars (e.g., Tesla). Analyzing brand extensions in this competitive context is important as it leads to more realistic brand evaluations (Kapoor & Heslop, 2009 ) and provides an overview of the brands’ relative strengths and weaknesses.
We contribute empirically to this research stream. We summarize multiple drivers of brand extension success from recent studies and incorporate them into a discrete choice model. We conduct choice-based conjoint experiments about autonomous cars in a purchase scenario (i.e., product extensions) and a renting scenario (i.e., service extensions). A renting scenario next to the purchase scenario is interesting in this research context because renting a car lowers the entry costs and makes autonomous driving more affordable to a general public. The renting scenario also accounts for the evolving “sharing economy,” in which consumers do not purchase cars but rent one temporarily, which is ideally suited for autonomous cars that are able to autonomously drive to the renter when needed (Krueger et al., 2016 ). Apart from contrasting these two scenarios, we also differentiate the results for parent brands originating from different industries.
To summarize, we aim to answer the main research questions which brands are preferred on the market for autonomous vehicles and which image associations contribute most to brand strength. We address two subquestions aiming at the moderating role of (1) the rental vs. purchase market and (2) the parent brand type (automobiles, technology, or specialized companies).
By addressing these questions, our study makes several contributions: First, this is one of the first empirical applications in marketing that focuses specifically on autonomous cars. Existing research originates primarily from the transportation literature (Gkartzonikas & Gkritza, 2019 ) or addresses legal, ethical, or social conflicts of autonomous systems (e.g., Bonnefon et al., 2016 ).
Second, the literature on brand extensions focuses primarily on fast-moving consumer goods (FMCG) and rather incremental innovations. By applying the brand extension framework to radical innovations and differentiating the findings for product and service extensions as well as different parent brand types, we generate additional insights into brand extension success drivers.
Third, we also contribute to the AI literature. While previous research has shown that consumers are hesitant to adopt AI services (Davenport et al., 2020 ), we demonstrate that consumers largely consider AI in branded autonomous vehicles. Brands play a central role in this decision. For example, a self-driving car by Tesla would be considered twice as often as an autonomous vehicle from an unknown brand.
Overall, we show that brand preferences differ systematically when buying versus renting a self-driving car. While, on average, technology brands are strongest when renting or purchasing an autonomous car, automaker brands are only preferred over new and specialized brands in purchase contexts, not in rental markets. Moreover, the new, specialized brand Tesla is the overall most preferred option, indicating that brand perceptions beyond the brand category play an important role. Our findings allow to disentangle the brand strength into the effects of brand image associations. As such, Google’s positioning can be explained by experiences with the parent brand, but it could still improve brand strength by highlighting the relevance of the associated brand portfolio for self-driving cars. We believe these findings could generate an impulse to further explore the role of brands in AI research and allow managers to diagnose what brand associations are most influential for creating brand strength and how to differentiate the brand from competitors.
2 Brand extension drivers
In order to generate an overview of research on brand extension success drivers, we based our literature search on Völckner and Sattler’s ( 2006 ) empirical analysis that investigated the significance and relative importance of a large set of variables. The authors found that fit between the parent brand and the extension product is the most important determinant of brand extension success, followed by marketing support, parent-brand conviction, retailer acceptance, and parent-brand experience.
In order to check to what extent these results were supported in following research, we further analyzed brand extension studies that refer to Völckner and Sattler ( 2006 ). We identified 18 manuscripts listed in Table 1 . This list is not a comprehensive overview of all brand extension research. We use it to indicate in which fields the identified success factors were replicated.
Most studies confirm the results from Völckner and Sattler ( 2006 ). The majority of them (11 of 18) focus on FMCG. Three of the studies look at the automobile sector, which is related to our research context: Hem et al. ( 2014 ) analyze hypothetical brand extensions of Ford into bicycles, motorcycles, and lawnmowers. Monga and Gürhan-Canli ( 2012 ) use a hypothetical example of automobile brands (BMW vs. Honda) launching sunglass brands. Monga and John ( 2010 ) study a hypothetical automobile brand extension of launching a wallet brand (Mercedes-Benz vs. Toyota). These three studies only use a small subset of Völckner and Sattler’s ( 2006 ) ten brand extension variables and, although they use automobile brands, focus on brand extension categories that are not automobile-related and do not focus on radical innovations.
Although radical innovations typically create a high amount of perceived consumer uncertainty and brands can help mitigate uncertainty, it is surprising that research about this intersection is relatively sparse (Brexendorf et al., 2015 ). One of the few studies is Lee et al. ( 2016 ) that shows that medium levels of brand and innovation orientations increase brand performance. High levels of brand orientation, i.e., strictly adhering to the core brand identity, can prevent firms from innovating. At the same time, high levels of innovativeness can be detrimental to the development of a strong brand with a clear and consistent brand image. Hence, it is not possible to conclude that overall brand strength or innovativeness of a company can be used to infer which brand exhibits a competitive advantage on the autonomous car market. Therefore, we identified additional research that is not based on Völckner and Sattler ( 2006 ) but focuses specifically on brand extensions to radical innovations. Butcher et al. ( 2018 ), Beverland et al. ( 2010 ), Truong et al. ( 2017 ), and Gronhaug et al. ( 2002 ) investigate success factors of radically innovative brand extensions. Most of them use a variation of Völckner and Sattler’s ( 2006 ) brand extension success factors. Butcher et al. ( 2018 ) highlight an additional variable: Brand extension authenticity, which assesses whether the brand is true to itself, maintaining its essential core, and whether the brand is what it appears to be, not counterfeit or exaggerated (Brown et al., 2003 ; Grayson & Martinec, 2004 ).
In the following, we test the set of Völckner and Sattler’s ( 2006 ) brand extension variables in the context of autonomous cars. We do not integrate retailer acceptance of the brand extension since it does not apply to autonomous vehicles. Given the consistent finding of the importance of fit and following Völckner and Sattler’s call for further research about this driver (p. 31), we decided to explore fit in more detail and differentiate between product fit and capability fit, i.e., the perceived capability of the parent brand to create self-driving cars. We also include image fit as it relates to brand extension authenticity that we expect to play a role for radical innovations such as autonomous cars.
3 Research design
3.1 procedure.
To answer our research questions, we work with a survey that first collects demographic data and then asks about brand perceptions by presenting all image dimensions that relate to the parent brand and are independent of autonomous cars. Thereafter, the survey introduces the research context of autonomous cars and presents image associations relating to the extension product. Afterwards, the survey allocates respondents randomly to either a rental or a purchase scenario and presents the discrete choice experiment.
3.2 Brands and brand image measurement
We integrated nine brands that were nested in three brand categories. Specifically, we used three technology brands (Google, Microsoft, Apple), three traditional automobile brands (Ford, Chrysler, Chevrolet), and three new companies in this product category (Tesla, Uber, Robocab). We employed the fictitious brand Robocab as a benchmark with no brand value (Keller, 1993 ). We picked US brands only in order to mitigate brand image effects that are affected by country of origin.
We collected brand image associations for the nine brands using a pick-any procedure (Sonnier & Ainslie, 2011 ). The procedure instructs respondents to select all brands (if any) that they associate with a certain image dimension. Sonnier and Ainslie ( 2011 ) use this approach in a similar research context about midsized sedans. Specifically, we integrated the brand image dimensions identified by the literature review in Sect. 2. As a caveat, we had to use single item measures for all constructs in order to reduce the length of the questionnaire. This limits us in measuring the full scope of the constructs. Accordingly, instead of measuring conviction, we only account for trust. Similarly, we measure the history of brand extensions as size of the brand portfolio. As we are researching future brand extensions, we cannot account for (the indirect nature of) marketing support but rely on consumer expectations about the marketing support. Appendix Table 4 shows an overview of the measures.
Consistent to Völckner and Sattler ( 2006 ), we also measure innovativeness of the consumer and perceived risk, or rather its single item measure of perceived uncertainty (using a 7-point rating scale). Since innovativeness and uncertainty are consumer character traits and are not brand-specific we control for them in our choice models as moderators.
3.3 Discrete choice experiment
To provide a setting for the choice experiment, we presented a scenario in the year 2025 when autonomous driving technology will be more advanced (van Doorn et al., 2017 ). In the rental scenario, we informed the participants that they should imagine going on vacation and need to rent a car. In the purchase scenario, respondents were instructed to imagine that they are planning to buy a new car.
The experiment varied three attributes, i.e., brand, level of autonomy, and price. We included the nine brands outlined in the previous chapter (Google, Microsoft, Apple, Ford, Chrysler, Chevrolet, Tesla, Uber, Robocab).
We integrated level of autonomy using two levels (and respective descriptions): Partially self-driving (advanced driver assistance and autopilot, keeps a car in its lane and allows for automatic breaking and cruise control) and fully self-driving (no driver input required from start to destination). These levels correspond to level 2 and level 5 defined by the National Highway Traffic Safety Administration and Society of Automotive Engineers.
We varied price per hour in the rental scenario from $10 to $20 with $2 intervals (as a benchmark, we presented a manually driven car that was kept fixed at $10 per hour). In the purchase scenario, we used relative prices compared to a manually driven car to keep the setup flexible regarding different price segments. Specifically, we applied six prices ranging from the same price as a manually driven car to $10,000 more at $2000 increments. Apart from these varied features, we used ceteris paribus instructions and informed the participants that the cars are similar in other attributes that are not mentioned (e.g., size; Eggers et al., 2016 ).
We presented three autonomous cars per choice set and added the manually driven car in a dual response task. The dual response task asked if the respondent would actually use the chosen self-driving car or, instead, preferred the manually driven car (Wlömert & Eggers, 2016 ). We treated the decision in the dual response task as an implied fourth alternative in the estimation. We employed eleven choice tasks in total using a randomized choice design that controlled for balance, orthogonality, and minimal overlap. An exemplary choice task for each scenario is presented in Appendix Fig. 2 .
We invited respondents to our survey via Prolific in 2019. We targeted US consumers who are 18 years or older and hold a driver’s license. Participants who completed the study were rewarded with $1.50 (this amount converts to an hourly rate of $10). In total, 551 respondents completed the survey, 255 in the rental, and 296 in the purchase scenario. Footnote 1
The sample is slightly skewed towards females (54% female, 46% male). Compared to US Census data (Howden & Meyer, 2011 ), relatively more young consumers have answered the survey with 20.3% being in the age bracket 18–24 years, 37.4% are 25–34 years, 20.5% range between 35 and 44 years, 11.6% are 45–54 years, and 10.1% being 55 or older. This younger sample is appropriate in our research context as it makes a relevant target group in our assumed future scenario. Most respondents were from the South of the USA (32.3%), followed by consumers from the Northeast (23.0%), Midwest (21.4%), and West (20.3%). A small share (2.9%) currently resides outside of the USA.
Table 2 shows how often respondents associated a brand with a specific image dimension. Associations vary strongly within and across brands. As expected, the fictitious brand Robocab has the lowest associations. However, some consumers do associate the brand with certain dimensions as also the newness of a brand can invoke image associations. Although some brand extension drivers are correlated (a maximum correlation of 0.53 between capability fit and image fit), multicollinearity is not critical. The maximum VIF score is 2.77 for parent brand experience in the rental scenario (see Appendix Table 5 for details).
We model consumer \(i\) ’s choices among the \(J\) options in the choice tasks as probabilities \({P}_{ij}\) using a multinomial logit model: \({P}_{ij}={e}^{\gamma ({V}_{ij})}/{\sum }_{j=1}^{J}{e}^{\gamma ({V}_{ij})}\) . In this model, \({V}_{ij}\) represents consumer \(i\) ’s systematic utility for option \(j\) , with \(j=1, 2, 3\) indicating experimentally varied autonomous cars and \(j=4\) referring to the no-choice option. Footnote 2 We normalize the scaling parameter \(\gamma\) to 1 because it cannot be identified independently from the utilities (Hauser et al., 2019 ).
We formulate four alternative models for the systematic utility. In the base model, we only consider partworth utilities \(\beta\) of the main effects, i.e., level of autonomy \({a}_{j}\) , price \({p}_{j}\) , and the no-choice option \({o}_{j}\) . For the brand, we differentiate the contribution of the parent brand category \({c}_{{b}_{j}}\) (technology brand, automaker brand, new brand) and of the specific brand \({b}_{j}\) within the category (e.g., Google, Microsoft, Apple in the technology brand category):
The second model further disentangles the brand effect that is due to the consumer’s perceived image associations of the brand, \({X}_{i{b}_{j}}\) :
Models 3 and 4 add interaction effects. In model 3, we test if the image effects differ depending on the brand category:
Model 4 tests if consumer’s perceived risk \({r}_{i}\) and innovativeness \({n}_{i}\) moderate the effects:
4.2 Estimation
We test the different models separately for the rental and purchase scenarios. In both cases, we have transformed the prices to values between $0 and $10 to indicate the extra charge compared to the manually driven car (measured in thousands for the purchase scenario). We modeled the price utility with a linear (vector) model. Effects of the brand category and the specific autonomous car brands within the category are zero-centered (effect-coded). Table 3 compares the results of models (1) and (2).
4.2.1 Model 1
Overall, consumers are more likely to choose an autonomous car in the rental scenario than in the purchase scenario. In both scenarios, consumers would prefer to drive fully autonomously than having a partially self-driving car.
On average, technology brands are most preferred for renting or purchasing an autonomous car. New brands are least preferred in a purchase setting, while they are equally preferred as automaker brands in the rental scenario. The brand preference ranking within the brand categories is generally consistent in both scenarios, with Google (Microsoft) being most (least) preferred in the technology brand category, Chevrolet (Chrysler) being most (least) preferred in the automaker category, and Tesla being the most preferred new brand. For new manufacturers, the least preferred brand differs. While Robocab is clearly the least preferred brand in the rental scenario, it shares the lowest utility in the purchase setting with Uber (preferences are not significantly different, p = 0.14). Remarkably, in both scenarios, Tesla is the overall most preferred autonomous car brand although it originates from the least preferred brand category. For rental cars, the utility of a Tesla car is 0.74 ( \({\beta }_{\mathrm{Tesla},\mathrm{rental}}=-0.12+0.86\) ), followed by Google with a utility of 0.35. In the purchase scenario, Tesla has a utility of 0.97 ( \({\beta }_{\mathrm{Tesla},\mathrm{purchase}}=-0.25+1.22\) ), compared to Google with a utility of 0.42. This translates to an incremental willingness to pay of $2.25 per hour more for renting a Tesla car compared to a Google car and $2231 more when buying a Tesla instead of a Google self-driving car.
4.2.2 Model 2
In model 2, we add the brand-specific covariate whether the consumer associates the specific brand with a certain image (= 1) or not (= 0). The corresponding betas express the conditional effect of being associated with a specific image dimension on the brand utility. The brand category and specific brand parameters are reduced to residual effects that express the remaining utility that is not captured by the brand associations. Most of the residual effects become non-significant after adding the image dimensions, which indicates that the image associations can explain a large part of the differences between the brands.
Our study generally confirms the image associations that were identified by Völckner and Sattler ( 2006 ), only PB-OC Linkage, which was also not supported by Völckner and Sattler, and Brand Portfolio do not have a significant effect. In the purchase scenario, also expected marketing support (BE EMS) does not play a role. Fit between the parent brand and the extension category is, in combination, the most influential image association in both scenarios, while product fit is weakest within the fit measures. Trust is the second most important image association. Moreover, in both markets, quality of the parent brand (PB Quality) and parent-brand experience (PB Experience) have a strong influence on brand preferences. Interestingly, the relevance of the remaining image associations differs strongly between the two scenarios. BE EMS has a strong effect in the rental scenario while it is not significant for purchases. Overall, these results demonstrate that image effects depend on the choice context. Model 3 checks if the relevance of image dimensions also depends on the brand category.
4.2.3 Model 3
Overall, we find that the brand category moderates the relative impact of the image associations, which implies meaningfully different positioning strategies among the brands.
In the rental market, newer brands benefit most if they can align themselves with specific associations. Specifically, the role of expected marketing support increases substantially making this the most important brand association for new brands. Newer brands rely significantly less on PB experience, canceling out the positive main effect of this brand association. Technology brands benefit most if users have experienced the brand before and consider the firm to be capable of creating the extension, making PB Experience and Capability Fit the two most influential brand association. The role of BE EMS is of lesser importance. Automaker brands are substantially less sensitive to the effect of brand associations in general. Specifically, associations with Capability Fit and Image Fit do not play a role for automaker brands. Automaker brands are therefore mostly affected by the main effects of the image associations (PB Trust, BE EMS, and PB Quality).
When purchasing a new self-driving car, there are fewer moderating effects of the brand category compared to the rental market. In fact, technology brands do not differ at all from the main effect of the brand associations. Similar to the rental market, newer brands do not require PB Experience but rely more on Image Fit. The effect of Product Fit is also less influential. Most of the moderating effects can be observed for automobile brands. Specifically, we see that automaker brands are increasingly preferred when associated with PB Experience. Associations with PB Quality, PB-OC Linkage, and Image Fit are less influential. See Appendix Table 6 for details.
4.2.4 Model 4
Perceived risk and innovativeness moderate the preferences in an intuitive way. In both markets, those who perceive a higher risk or are less innovative are less likely to choose an autonomous car in general or prefer partial instead of full autonomy. In the rental scenario, those consumers with higher perceived risk prefer automaker brands more than technology brands. Consumers who are more innovative are more likely to consider new car brands and are less price sensitive. Only four out of the 36 moderators on the brand image effects are significant. Due to the sparsity of effects, we do not interpret this model further.
5 Branding implications
Two factors affect brand strength according to our model: (1) the strength of the associations with a brand (Table 2 ) and (2) the marginal effect of the association on utility (Appendix Table 6 ). Consistent with Keller’s ( 1993 ) conceptualization of customer-based brand equity, a brand benefits most if consumers hold strong (relating to 1) and favorable (relating to 2) brand associations in memory. Footnote 3 Firms can therefore increase their brand strength either by strengthening the associations or by affecting the perceived utility, e.g., relevance, of the association.
Figure 1 shows the positioning of the most preferred brands per category, Google, Chevrolet, and Tesla, on the two aforementioned dimensions in the rental market (see Appendix Fig. 3 for the purchase market). Google’s brand strength is mostly due to strong associations with PB Experience and Capability fit, which both have a strong positive effect on utility. Google is also highly associated with its brand portfolio; however, this dimension is not relevant when evaluating autonomous cars. To increase its brand strength, Google could promote the relevance of other products in their portfolio for autonomous driving, e.g., that experiences from Google Maps help navigation or Google Glass developments can assist street sign recognition.

Brand profiles (rental scenario)
Chevrolet’s positioning illustrates that automaker brands benefit less from brand associations in general. Chevrolet is also only weakly associated with the dimensions, meaning that most of the effects are in the bottom left quadrant (weak associations and weak marginal effect). Chevrolet could try and strengthen its brand by increasing the relevance of its strongest association PB-OC Linkage, e.g., by connecting autonomous vehicles more with the car category than with the self-driving technology. This would, however, also benefit other competitors from the automobile industry, which are also strongly associated with PB-OC Linkage. Alternatively, Chevrolet would benefit if consumers held stronger associations with the most influential dimensions PB Trust and BE EMS.
Tesla’s brand strength can be explained by strong associations with highly influential dimensions, i.e., Image Fit, PB Quality, and BE EMS. Tesla could increase its strength further by improving associations with PB Trust.
6 Summary and discussion
In this research, we measure consumer preferences for autonomous cars in a rental and purchase context and focus on brand extensions from parent brands that originate from three manufacturer types, i.e., automobiles, technology, or newer, specialized companies. Several results are managerially and theoretically relevant.
First, our findings show that despite the uncertainty that consumers face in this radically new market, they are willing to consider autonomous driving. Brands play a central role in this context. For example, our results predict that 74% of the consumers would rent a Tesla self-driving car at a 20% price premium instead of a manually driven car, while the majority would prefer the manually driven car when the autonomous car was from an unknown brand (38% share). The results also demonstrate that consumers trade off multiple brands originating from different backgrounds. While technology brands are, on average, more preferred than automaker or new brands in our study, Tesla is the overall most preferred brand for self-driving cars, indicating that brand perceptions beyond the brand category play an important role.
Second, we find that brand preferences differ systematically when buying versus renting a self-driving car. These results have meaningful managerial implications. For example, automaker brands are preferred over new brands in purchase contexts; however, traditional car brands cannot leverage their brand equity from the purchase to the rental market. In the rental context, the new brand Uber has about the same brand strength as Chrysler. Established automaker brands might therefore prefer to stake their claim in the purchase market.
Third, our findings allow to diagnose brand strength and dissect the perception into the effects of several brand image associations. Despite major differences in the research context to previous studies that focus mostly on FMCG, we find support for the majority of brand extension success drivers that Völckner and Sattler ( 2006 ) identified. We extend Völckner and Sattler’s research by showing more nuanced effects for fit, i.e., capability fit, product fit, and image fit, which each shows significant effects.
Fourth, we find that the importance of brand extension success factors differs between parent-brand categories. When renting a self-driving car from a technology brand, consumers rely more on experience and capability fit. This could be affected by the process of renting a self-driving car, which likely will involve software with payment capabilities that the consumers might have experienced by these companies and consider them capable of. This notion is supported by the result that experience with an automobile brand is increased when buying a car. This experience might originate from showrooms or test drives at a dealership which play a more important role in the purchase context. Relatedly, we find that BE EMS plays a relevant role for rentals and particularly for new brands, but not for purchases. Our measurement of BE EMS likely entails expected customer support that is arguably more important during the rental period as it involves multiple touchpoints in a short amount of time. Moreover, the role of image fit is particularly stronger for new brands, while it is weaker for automobile brands. An explanation could be that newer brands are more specifically targeted at self-driving cars such that the brand image appears more consistent. These interactions are plausible and managerially relevant. For generalizability, future research should adopt a conceptual perspective to explore the underlying mechanisms for evaluating these brand categories and choice contexts in more detail. Given the different effects of experience and marketing support, it seems promising to focus on the role of touchpoints and the customer journey.
Our research is subject to limitations. We limited ourselves mostly to the brand extension drivers that Völckner and Sattler ( 2006 ) identified in their research, while it is possible that our research context warrants additional associations to be studied. Moreover, due to the multiple drivers and brands we test, we had to use single item measures to prevent respondent fatigue. Relatedly, we measure expected marketing support, which is limited to consumer expectations about whether a company will deliver competent marketing and does not take into account the indirect nature of some marketing actions, e.g., the persuasiveness of an ad. Footnote 4 Also, we use discrete measures of associations and can only account for the strength of an association on an aggregate level, not an individual level. In addition, while we focused on consumers with a driver’s license, this requirement will not be necessary when researching fully autonomous cars that will also enable mobility to, e.g., visually impaired consumers. These consumers might have limited experience with traditional automaker brands and might consider other brands and other factors in their decision to adopt a self-driving car. Moreover, self-driving cars also need to compete with manually driven cars in the future. We incorporated the manually driven car via a none option. However, in this way, the manually driven car is unspecified in terms of the brand (and other characteristics). Purchasing a car involves more complex decision processes than we model in our research, likely stretching across several touchpoints (Lemon & Verhoef, 2016 ) and following a decision hierarchy, e.g., consider-then-choose (Hauser, 2014 ). The analysis of brand image effects when forming consideration sets for autonomous vehicles or the effect of touchpoints on brand image (Baxendale et al., 2015 ) seem promising to pursue further in our research context. Finally, branding for autonomous cars might not only take place via brand extensions but also via co-branding (e.g., an autonomous car built by Ford and Google) or ingredient branding (e.g., a Ford car with self-driving technology by Google). While these limitations hinder generalizability, they offer promising opportunities for future research.
We pretested the survey with 50 respondents in the purchase scenario. We made no further changes based on the pretest so that we added the 50 consumers to the final analysis.
For notational simplicity, we drop the subscript referring to the choice sets.
In addition, Keller mentions uniqueness, which is also consistent with our model as only utility differences among the alternatives affect choices.
The empirical results are robust to the exclusion of expected marketing support.
Albrecht, C.-M., Backhaus, C., Gurzki, H., & Woisetschläger, D. M. (2013). Drivers of brand extension success: What really matters for luxury brands. Psychology & Marketing, 30 (8), 647–659.
Article Google Scholar
Baxendale, S., Macdonald, E. K., & Wilson, H. N. (2015). The impact of different touchpoints on brand consideration. Journal of Retailing, 91 (2), 235–253.
Beverland, M. B., Napoli, J., & Farrelly, F. (2010). Can all brands innovate in the same way? A typology of brand position and innovation effort. Journal of Product Innovation Management, 27, 33–48.
Bonnefon, J. F., Shariff, A., & Rahwan, I. (2016). The social dilemma of autonomous vehicles. Science, 352 (6293), 1573–1576.
Brexendorf, T. O., Bayus, B., & Keller, K. L. (2015). Understanding the interplay between brand and innovation management: Findings and future research directions. Journal of the Academy of Marketing Science, 43 (5), 548–557.
Brown, S., Kozinets, R. V., & Sherry, J. F., Jr. (2003). Teaching old brands new tricks: Retro branding and the revival of brand meaning. Journal of Marketing, 67 (3), 19–33.
Butcher, L., Sung, B., & Raynes-Goldie, K. (2018). Gotta catch ‘em all: Invigorating Pokémon through an innovative brand extension. Journal of Brand Management, 26 (3), 227–239.
Davenport, T., Guha, A., Grewal, D., & Bressgott, T. (2020). How artificial intelligence will change the future of marketing. Journal of the Academy of Marketing Science, 48, 24–42.
Dens, N., & De Pelsmacker, P. (2010). Attitudes toward the extension and parent brand in response to extension advertising. Journal of Business Research, 63 (11), 1237–1244.
Eggers, F., & Eggers, F. (2011). Where have all the flowers gone? Forecasting green trends in the automobile industry with a choice-based conjoint adoption model. Technological Forecasting and Social Change, 78 (1), 51–62.
Eggers, F., Hauser, J.R., Selove, M. (2016). The effects of incentive alignment, realistic images, video instructions, and ceteris paribus instructions on willingness to pay and price equilibria. Proceedings of the Sawtooth Software Conference, 1–20.
Estes, Z., Gibbert, M., Guest, D., & Mazursky, D. (2012). A dual-process model of brand extension: Taxonomic feature-based and thematic relation-based similarity independently drive brand extension evaluation. Journal of Consumer Psychology, 22 (1), 86–101.
Gierl, H., & Huettl, V. (2011). A closer look at similarity: The effects of perceived similarity and conjunctive cues on brand extension evaluation. International Journal of Research in Marketing, 28 (2), 120–133.
Gkartzonikas, C., & Gkritza, K. (2019). What have we learned? A review of stated preference and choice studies on autonomous vehicles. Transportation Research Part C: Emerging Technologies, 98, 323–337.
Grayson, K., & Martinec, R. (2004). Consumer perceptions of iconicity and indexicality and their influence on assessments of authentic market offerings. Journal of Consumer Research, 31 (2), 296–312.
Gronhaug, K., Hem, L., & Lines, R. (2002). Exploring the impact of product category risk and consumer knowledge in brand extensions. Brand Management, 9 (6), 463–476.
Hauser, J. R. (2014). Consideration-set heuristics. Journal of Business Research, 67 (8), 1688–1699.
Hauser, J. R., Eggers, F., & Selove, M. (2019). The strategic implications of scale in choice-based conjoint analysis. Marketing Science, 38 (6), 1059–1081.
Google Scholar
Hem, L. E., Iversen, N. M., & Olsen, L. E. (2014). Category characteristics’ effects on brand extension attitudes: A research note. Journal of Business Research, 67 (8), 1589–1594.
Howden, L. M., & Meyer, J. A. (2011). Age and sex composition, 2010 . US Department of Commerce.
Kapoor, H., & Heslop, L. A. (2009). Brand positivity and competitive effects on the evaluation of brand extensions. International Journal of Research in Marketing, 26 (3), 228–237.
Keller, K. L. (1993). Conceptualizing, measuring, and managing customer-based brand equity. The Journal of Marketing, 57 (1), 1–22.
Kim, H., & John, D. R. (2008). Consumer response to brand extensions: Construal level as a moderator of the importance of perceived fit. Journal of Consumer Psychology, 18 (2), 116–126.
Krueger, R., Rashidi, T. H., & Rose, J. M. (2016). Preferences for shared autonomous vehicles. Transportation research part C: Emerging technologies, 69, 343–355.
Lee, W. J., O’Cass, A., & Sok, P. (2016). Why doesn’t our branding pay off: Optimising the effects of branding through innovation. European Journal of Marketing, 50 (3/4), 509–529.
Lemon, K. N., & Verhoef, P. C. (2016). Understanding customer experience throughout the customer journey. Journal of Marketing, 80 (6), 69–96.
Meyvis, T., Goldsmith, K., & Dhar, R. (2012). The importance of the context in brand extension: How pictures and comparisons shift consumers’ focus from fit to quality. Journal of Marketing Research, 49 (2), 206–217.
Milberg, S. J., Sinn, F., & Goodstein, R. C. (2010). Consumer reactions to brand extensions in a competitive context: Does fit still matter? Journal of Consumer Research, 37 (3), 543–553.
Monga, A. B., & Gürhan-Canli, Z. (2012). The influence of mating mind-sets on brand extension evaluation. Journal of Marketing Research, 49 (4), 581–593.
Monga, A. B., & John, D. R. (2010). What makes brands elastic? The influence of brand concept and styles of thinking on brand extension evaluation. Journal of Marketing, 74 (3), 80–92.
Rühle, A., Völckner, F., Sattler, H., & Hatje, C. (2017). Attitude-based versus choice-behavior-based success of brand extensions. Schmalenbach Business Review, 64 (2), 125–140.
Sattler, H., Völckner, F., Riediger, C., & Ringle, C. M. (2010). The impact of brand extension success drivers on brand extension price premiums. International Journal of Research in Marketing, 27 (4), 319–328.
Shen, Y.-C., Bei, L.-T., & Chu, C.-H. (2011). Consumer evaluations of brand extension: The roles of case-based reminding on brand-to-brand similarity. Psychology and Marketing, 28 (1), 91–113.
Sichtmann, C., & Diamantopoulos, A. (2013). The impact of perceived brand globalness, brand origin image, and brand origin–extension fit on brand extension success. Journal of the Academy of Marketing Science, 41 (5), 567–585.
Sonnier, G., & Ainslie, A. (2011). Estimating the value of brand-image associations : The role of general and specific brand image. Journal of Marketing Research, 48 (3), 518–531.
Truong, Y., Klink, R. R., Simmons, G., Grinstein, A., & Palmer, M. (2017). Branding strategies for high-technology products: The effects of consumer and product innovativeness. Journal of Business Research, 70, 85–91.
Van Doorn, J., Mende, M., Noble, S.M., Hulland, J., Ostrom A.L., Grewal, D., Petersen, J.A. (2017). Domo Arigato Mr. Roboto: Emergence of automated social presence in organizational frontlines and customers’ service experiences. Journal of Service Research, 20(1), 43–58.
Völckner, F., & Sattler, H. (2006). Drivers of brand extension success. Journal of Marketing, 70 (2), 18–34.
Völckner, F., & Sattler, H. (2007). Empirical generalizability of consumer evaluations of brand extensions. International Journal of Research in Marketing, 24 (2), 149–162.
Völckner, F., Sattler, H., Hennig-Thurau, T., & Ringle, C. M. (2010). The role of parent brand quality for service brand extension success. Journal of Service Research, 13 (4), 379–396.
Wlömert, N., & Eggers, F. (2016). Predicting new service adoption with conjoint analysis: External validity of BDM-based incentive-aligned and dual-response choice designs. Marketing Letters, 27 (1), 195–210.
Download references
Author information
Authors and affiliations.
Department of Marketing, University of Groningen, PO Box 800, 9700 AV, Groningen, The Netherlands
Felix Eggers
Department of Marketing, Menlo College, 1000 El Camino Real, Atherton, CA, 94027-4301, USA
Fabian Eggers
You can also search for this author in PubMed Google Scholar
Corresponding author
Correspondence to Felix Eggers .
Additional information
Publisher's note.
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.

a Exemplary choice task–rental scenario. b Exemplary choice task–purchase scenario

Brand profiles (purchase scenario)
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/ .
Reprints and permissions
About this article
Eggers, F., Eggers, F. Drivers of autonomous vehicles—analyzing consumer preferences for self-driving car brand extensions. Mark Lett 33 , 89–112 (2022). https://doi.org/10.1007/s11002-021-09571-x
Download citation
Accepted : 27 April 2021
Published : 13 May 2021
Issue Date : March 2022
DOI : https://doi.org/10.1007/s11002-021-09571-x
Share this article
Anyone you share the following link with will be able to read this content:
Sorry, a shareable link is not currently available for this article.
Provided by the Springer Nature SharedIt content-sharing initiative
- Autonomous cars
- Brand extension
- Brand image
- Innovations
- Conjoint analysis
- Find a journal
- Publish with us
- Track your research
Help | Advanced Search
Computer Science > Robotics
Title: self-driving cars: a survey.
Abstract: We survey research on self-driving cars published in the literature focusing on autonomous cars developed since the DARPA challenges, which are equipped with an autonomy system that can be categorized as SAE level 3 or higher. The architecture of the autonomy system of self-driving cars is typically organized into the perception system and the decision-making system. The perception system is generally divided into many subsystems responsible for tasks such as self-driving-car localization, static obstacles mapping, moving obstacles detection and tracking, road mapping, traffic signalization detection and recognition, among others. The decision-making system is commonly partitioned as well into many subsystems responsible for tasks such as route planning, path planning, behavior selection, motion planning, and control. In this survey, we present the typical architecture of the autonomy system of self-driving cars. We also review research on relevant methods for perception and decision making. Furthermore, we present a detailed description of the architecture of the autonomy system of the self-driving car developed at the Universidade Federal do Espírito Santo (UFES), named Intelligent Autonomous Robotics Automobile (IARA). Finally, we list prominent self-driving car research platforms developed by academia and technology companies, and reported in the media.
Submission history
Access paper:.
- Other Formats
References & Citations
- Google Scholar
- Semantic Scholar
DBLP - CS Bibliography
Bibtex formatted citation.
Bibliographic and Citation Tools
Code, data and media associated with this article, recommenders and search tools.
- Institution
arXivLabs: experimental projects with community collaborators
arXivLabs is a framework that allows collaborators to develop and share new arXiv features directly on our website.
Both individuals and organizations that work with arXivLabs have embraced and accepted our values of openness, community, excellence, and user data privacy. arXiv is committed to these values and only works with partners that adhere to them.
Have an idea for a project that will add value for arXiv's community? Learn more about arXivLabs .
Self-Driving Cars
Ieee account.
- Change Username/Password
- Update Address
Purchase Details
- Payment Options
- Order History
- View Purchased Documents
Profile Information
- Communications Preferences
- Profession and Education
- Technical Interests
- US & Canada: +1 800 678 4333
- Worldwide: +1 732 981 0060
- Contact & Support
- About IEEE Xplore
- Accessibility
- Terms of Use
- Nondiscrimination Policy
- Privacy & Opting Out of Cookies
A not-for-profit organization, IEEE is the world's largest technical professional organization dedicated to advancing technology for the benefit of humanity. © Copyright 2024 IEEE - All rights reserved. Use of this web site signifies your agreement to the terms and conditions.
- {{subColumn.name}}
Mathematical Biosciences and Engineering
- {{newsColumn.name}}
- Share facebook twitter google linkedin

Intelligent control of self-driving vehicles based on adaptive sampling supervised actor-critic and human driving experience
- Jin Zhang 1 ,
- Nan Ma 2 , , ,
- Zhixuan Wu 3 ,
- Cheng Wang 1 ,
- Yongqiang Yao 4
- 1. Beijing Key Laboratory of Information Service Engineering, Beijing Union University, Beijing 100101, China
- 2. Faculty of Information Technology, Beijing University of Technology, Beijing 100124, China
- 3. Beijing University of Posts and Telecommunications, Beijing 100876, China
- 4. Beijing Shuncheng High Technology Corporation, Beijing 102206, China
- Received: 04 December 2023 Revised: 05 May 2024 Accepted: 13 May 2024 Published: 24 May 2024
- Full Text(HTML)
- Download PDF
Due to the complexity of the driving environment and the dynamics of the behavior of traffic participants, self-driving in dense traffic flow is very challenging. Traditional methods usually rely on predefined rules, which are difficult to adapt to various driving scenarios. Deep reinforcement learning (DRL) shows advantages over rule-based methods in complex self-driving environments, demonstrating the great potential of intelligent decision-making. However, one of the problems of DRL is the inefficiency of exploration; typically, it requires a lot of trial and error to learn the optimal policy, which leads to its slow learning rate and makes it difficult for the agent to learn well-performing decision-making policies in self-driving scenarios. Inspired by the outstanding performance of supervised learning in classification tasks, we propose a self-driving intelligent control method that combines human driving experience and adaptive sampling supervised actor-critic algorithm. Unlike traditional DRL, we modified the learning process of the policy network by combining supervised learning and DRL and adding human driving experience to the learning samples to better guide the self-driving vehicle to learn the optimal policy through human driving experience and real-time human guidance. In addition, in order to make the agent learn more efficiently, we introduced real-time human guidance in its learning process, and an adaptive balanced sampling method was designed for improving the sampling performance. We also designed the reward function in detail for different evaluation indexes such as traffic efficiency, which further guides the agent to learn the self-driving intelligent control policy in a better way. The experimental results show that the method is able to control vehicles in complex traffic environments for self-driving tasks and exhibits better performance than other DRL methods.
- self-driving ,
- intelligent control ,
- actor-critic ,
- deep reinforcement learning
Citation: Jin Zhang, Nan Ma, Zhixuan Wu, Cheng Wang, Yongqiang Yao. Intelligent control of self-driving vehicles based on adaptive sampling supervised actor-critic and human driving experience[J]. Mathematical Biosciences and Engineering, 2024, 21(5): 6077-6096. doi: 10.3934/mbe.2024267
Related Papers:
- This work is licensed under a Creative Commons Attribution-NonCommercial-Share Alike 4.0 Unported License. To view a copy of this license, visit http://creativecommons.org/licenses/by-nc-sa/4.0/ -->
Supplements
Access history.
- Corresponding author: Email: [email protected] ;
Reader Comments
- © 2024 the Author(s), licensee AIMS Press. This is an open access article distributed under the terms of the Creative Commons Attribution License ( http://creativecommons.org/licenses/by/4.0 )
通讯作者: 陈斌, [email protected]
沈阳化工大学材料科学与工程学院 沈阳 110142
Article views( 10 ) PDF downloads( 5 ) Cited by( 0 )
Figures and Tables

Figures( 7 ) / Tables( 4 )

Associated material
Other articles by authors.
- Yongqiang Yao
Related pages
- on Google Scholar
- Email to a friend
- Order reprints
Export File

- Figure 1. Input and output representations of the model
- Figure 2. The inputs and outputs of actor
- Figure 3. ASS-AC framework
- Figure 4. Training environment of CARLA
- Figure 5. Adversarial scenarios
- Figure 6. Training results in CARLA Town06
- Figure 7. New test scenarios

Accountability in Autonomous Automobile Accidents
The issue of liability with self-driving cars.
- Joseph Murphy None
With the increased implementation of self-driving cars on public roads, crashes and deaths caused by these vehicles have highlighted the complex matter of liability in these circumstances. The discussion of trials and cases surrounding deaths by autonomous vehicles illuminates how responsibility is deferred from the car manufacturer and placed primarily on the human behind the wheel. This paper highlights misconceptions about the level of automation in autonomous vehicles by the public and describes the necessity of proper tort liability law to adapt to the ever-changing automobile environment.

How to Cite
- Endnote/Zotero/Mendeley (RIS)
Copyright (c) 2024 Joseph Murphy

This work is licensed under a Creative Commons Attribution-NonCommercial 4.0 International License .
Please follow the link for further Copyright and License Information .
Make a Submission
Information.
- For Readers
- For Authors
- For Librarians
Bellarmine Law Society Review 140 Commonwealth Ave. Chestnut Hill, MA 02467


Drivers Daily
Everything You Need To Know About Self-Driving Cars
Posted: March 25, 2024 | Last updated: March 25, 2024

With autonomous vehicles like the Tesla Model S and Cadillac Escalade, it seems like automotive dreams of our favorite sci-fi media have come to fruition.
But how exactly do these cars work? Are they truly self-driving? And most importantly, are they safe? Let’s find out.

What Is An Autonomous Vehicle?
A broad definition of an autonomous vehicle would be a vehicle that has technology to sense driving conditions like pedestrians and traffic while also enabling the car to change speed or course without being controlled by a person.
Autonomous vehicles are also called self-driving vehicles.

How Does It Work?
Self-driving cars can sense what’s happening around them with three main features: radar, cameras, and laser-based light detection (LiDar) .
These three features act like eyes for the car and they send data to sophisticated on-board processors and software, which tells the car how to react.
")
How Does It Work? (cont’d)
The sensors can detect a wide range of things, like curbs, pedestrians, and even lane markings.
Sensors on autonomous cars can be great safety features, but they aren’t foolproof. Certain weather conditions like snow or rain can diminish how effectively the car can sense lane markings or curbs.

SAE International’s Definition
While there are several cars on the market that have self-driving features, the world has yet to see a fully autonomous vehicle.
According to SAE International, one of the world’s leading organizations of automotive engineers, there are six different levels of autonomous driving , and only the final level is truly self-driving.

Levels 0 to 2 are driver support features and lack the sophistication of higher levels that are deemed to have self-driving capabilities.
At Level 0, the car may have features like lane departure warnings and a blind-spot alert system, but the driver is in full control of how the car reacts to its surroundings.

Cars at Level 1 may have responsive safety features that are slightly autonomous. For example, some cars are equipped with a lane-keeping system that will center the car if the driver is veering too much to one side.

Most new cars are equipped with Level 2 autonomous features. At Level 2, the tech features of the car communicate with each other, and can also support simultaneous active features.
Adaptive cruise control i s an example of Level 2 technology, as it can adjust the car’s speed to maintain a specific distance from the driver ahead while also keeping the car in the center of the lane.
")
Level 2 (cont’d)
Most new cars that boast self-driving technology are classified as Level 2. Tesla’s Full Self-Driving and General Motor’s Super Cruise are Level 2 autonomous tech.
While these systems are incredibly responsive, drivers still need to be focused on the road when using these features and be ready to re-take control of the vehicle at any moment.

At Level 3, a vehicle starts to become fully autonomous. A Level 3 autonomous car is able to drive itself under certain conditions .
These cars can sense curves in the road, control speed and steering, and follow a specified route. However, even with this improved responsiveness, drivers still need to be alert and ready to take control.
")
Level 3 (cont’d)
Honda and Mercedes are the only companies that have created Level 3 autonomous driving technology.
Honda was the first to up the ante with their 100 Legend Flagship. Unveiled in 2021, this car can only be leased in Japan.
")
Mercedes-Benz is the only automaker to offer Level 3 autonomous driving features in America. Their Drive Pilot system will be rolled out in California and Nevada and will be available in the 2024 S-Class and EQS Sedan.
The system can control driving up to a certain speed, allowing drivers to take their eyes off the road and focus on something else, like watching a movie.

At Level 4, a car can drive itself on a specified route on known roads. The driver doesn’t have to retake control at any time, so these cars often lack foot pedals or steering wheels .
Right now, Level 4 autonomous driving technology is being tested in certain rideshare companies, but it has yet to be approved for extensive use.

Level 5 is the final point of evolution for self-driving cars. These cars can drive themselves on any road, in any conditions, and don’t require any driver input. They have no need for steering wheel or pedals.
Level 5 is the stuff of sci-fi, and as of now, any Level 5 autonomous driving systems are purely theoretical.

Self-Driving Cars In The Real World
Though they’re not quite at Level 3, some companies use fleets of trucks that are self-driving . These trucks often have a “safety driver” on board but some have no driver at all.
While many of these trucks are restricted to warehouse grounds, some are used to transport goods on major roads.
")
Self-Driving Cars In The Real World (cont’d)
Gatik and Kodiak Robotics are two companies that use self-driving trucks on certain routes. While they hope to soon run the trucks without a safety driver, the lack of human control in today’s self-driving cars isn’t without risk.

Is Self-Driving Technology Safe?
While autonomous driving features are reliable for the most part, there have been serious cases of this tech going wrong.
Most recently, Tesla had to recall more than 2 million vehicles after their autopilot software was deemed unsafe by the National Highway Traffic Safety Administration.
")
Is Self-Driving Technology Safe? (cont’d)
Tesla isn’t the only company to suffer a setback because of faulty autonomous software.
One of General Motors’ subsidiaries, Cruise, had to put a pause on making their self-driving cars, after one was involved in an accident with a pedestrian.

They're Not Going Anywhere
Despite the recent safety incidents, self-driving cars are here to stay. May Mobility recently unveiled a new transit service that uses fully autonomous cars.
The service is only available in Arizona, but their fleet of self-driving Toyota minivans has proven to be safe and effective—even with no safety driver onboard .

Andrey_Popov, Shutterstock
")
Advantages Of Self-Driving Cars (cont’d)
According to the National High Traffic Safety Administration, today’s self-driving cars do help reduce traffic congestion and accidents .
That's because the automated driver assistance system (ADAS) in many new cars helps drivers anticipate imminent threats and work to avoid them.
")
Self-driving cars are also a great option for people who can’t drive, such as the elderly or those with disabilities.
Autonomous vehicles offer more mobility than conventional public transportation, making it easier for people to run errands and get to important appointments.

Environmental Considerations
In addition to less congestion, autonomous vehicles can also benefit the environment.
A study from the University of Michigan showed that self-driving vehicles reduce energy use and greenhouse gas emissions by up to 9%, when compared with traditional cars.

New Cars With Self-Driving Technology
Pretty much all new cars feature autonomous driver assistance software, like adaptive cruise control or automatic emergency braking.
However, the most sophisticated Level 2 self-driving features can be found in vehicles from Ford, General Motors, Mercedes-Benz, and Tesla.

Ford BlueCruise
BlueCruise is available in most new Fords and Lincolns and wowed consumers with its adaptive cruise control with lane-keeping technology. With this system, drivers can temporarily take their hand off the wheel, but they should still keep their eyes on the road ahead.
")
Ford BlueCruise (cont’d)
With BlueCruise, drivers can pre-map more than 100,000 miles of road in the car’s system, which helps with navigation. The software notifies drivers when it can be activated and can automatically steer the car.
Buyers will have to purchase a three-year subscription for BlueCruise—and get the right trim to use the software.

General Motors Super Cruise
The lane-keeping system that’s part of the Super Cruise software is smart enough to handle curves in the road and features an automatic braking system that can prevent collisions.
The software still requires drivers to focus on the road, and even has a monitoring system to watch your eyes and alert you if you’re not paying enough attention to the road.
")
General Motors Super Cruise (cont’d)
Super Cruise is available on several electric vehicles, like the Chevy Bolt, and on several Cadillac vehicles, including the 2024 Escalade. The first three years of the software are free, before requiring a subscription.
200,000 miles of North American roads are pre-mapped into the system by General Motors.

Mercedes-Benz Distronic Plus
The Distronic Plus is one of the more thrilling adaptive cruise control and lane-centering systems. Unlike other systems, it can handle high speeds, up to 120 mph , and will warn drivers if they’re about to be passed by another vehicle.
Many new additions to the Mercedes-Benz lineup also feature Parktronic software, which uses driver input to help the car self-park.

Mercedes-Benz Drive Pilot
Recently, Mercedes-Benz unveiled their Drive Pilot system. Up to certain speeds, this Level 3 autonomous driving software can completely take over from the driver , allowing them to take their eyes off the road.
The software will be available by subscription in the 2024 S-Class and EQS sedan.

Tesla Autopilot
Tesla has long been a pioneer when it comes to self-driving cars. Their Autopilot software is a standard feature on all new models and uses an awareness of surrounding traffic to slow or accelerate the car to match the flow of traffic.
This is much like most other Level 2 systems, but this software can be upgraded to include Full Self-Driving.

Tesla Full Self-Driving
With Full Self-Driving, the car can change lanes at high speeds, park itself, and back out of a parking space. There’s also an upgrade in development that would allow the car to automatically stop for traffic lights and navigate highway ramps.
Tesla’s Full Sel-Driving software was recently recalled, but the company has corrected the problems that were outlined by the National Highway Traffic Safety Administration,

The Future Of Self-Driving Cars
According to consumer data, the interest in autonomous vehicles is steadily growing—and people are willing to shell out big bucks for these features.
By 2035, autonomous driving software is expected to be a $300 billion industry . By 2030, we can expect to see more passenger cars with Level 3 capabilities, or higher.

Final Thoughts
Self-driving cars are here to stay, but despite their popularity, advances in autonomous driving software are still really slow.
What we can achieve with the current Level 2 software has shown amazing benefits like increasing mobility for certain members of the population and reducing traffic congestion and greenhouse gas emissions. But it’ll still be a while before we can fully relinquish control of our cars.
More for You
Donald Trump Prosecutors Face 'Practical Problem' With Jury Instructions
18 Trivia Tidbits For Trivia Elitists
Here's the Net Worth That Puts You in the Top 10% of American Households by Age
5 recent shows Netflix canceled on cliffhangers
Garlic Lovers—One-Pot Creamy Garlic Chicken Will Be Your Go-To Weeknight Dinner
Hammond and May Take Clarkson's Eurocrash Car Around The Eboladrome | The Grand Tour | DRIVETRIBE
20 Front Porch Column Ideas That'll Beautify Your Home
Putin's NATO Ally Delivers Sharp Critique of Russian Military
Infinite Craft: How to Make Brick
Las Vegas Aces' Becky Hammon, A'ja Wilson: Critics getting Caitlin Clark narrative wrong
25 Healthier Fast Food Swaps That Won’t Disappoint
When Does 'Blue Bloods' Return to CBS? Here's What We Know About the Show's Future
Walmart Shuts Down Stores and Lays Off Hundreds of Employees
States with the Most Foxes in America
Jordan Spieth strongly disagrees with Rory McIlroy's 'false' claims
WNBA Rookie Kate Martin is Trending For Insane Half-Court Shot
29 Cool Movie Facts About a Bunch of Cool Movies
The 11 Best Instant Noodles, According to Bon Appétit Editors
Landscaper’s Trick for Keeping Cut Grass Out of Mulch Beds Is Pure Genius
The High-Speed X-Plane That Could Revolutionize Warfare
- Election 2024
- Entertainment
- Newsletters
- Photography
- Personal Finance
- AP Investigations
- AP Buyline Personal Finance
- AP Buyline Shopping
- Press Releases
- Israel-Hamas War
- Russia-Ukraine War
- Global elections
- Asia Pacific
- Latin America
- Middle East
- Election Results
- Delegate Tracker
- AP & Elections
- Auto Racing
- 2024 Paris Olympic Games
- Movie reviews
- Book reviews
- Personal finance
- Financial Markets
- Business Highlights
- Financial wellness
- Artificial Intelligence
- Social Media
Waymo is latest company under investigation for autonomous or partially automated technology
FILE - A Waymo minivan moves along a city street as an empty driver’s seat and a moving steering wheel drive passengers during an autonomous vehicle ride, on April 7, 2021, in Chandler, Ariz. The U.S. government’s highway safety agency has opened another investigation of automated driving systems, this time into crashes involving Waymo’s self-driving vehicles. The National Highway Traffic Safety Administration posted documents detailing the probe on its website early Tuesday after getting 22 reports of Waymo vehicles either crashing or doing something that may have violated traffic laws. (AP Photo/Ross D. Franklin, File)
- Copy Link copied
DETROIT (AP) — The U.S. government’s highway safety agency has opened another investigation of automated driving systems, this time into crashes involving Waymo’s self-driving vehicles.
The National Highway Traffic Safety Administration posted documents detailing the probe on its website early Tuesday after getting 22 reports of Waymo vehicles either crashing or doing something that may have violated traffic laws.
In the past month, the agency has opened at least four investigations of vehicles that can either drive themselves or take on at least some driving functions as it appears to be getting more aggressive in regulating the devices.
In the probe of Waymo, which was once Google’s self-driving vehicle unit, the agency said it has reports of 17 crashes and five other reports of possible traffic law violations. No injuries were reported.
AP AUDIO: Waymo is latest company under investigation for autonomous or partially automated technology
AP correspondent Donna Warder reports, the U.S. government’s highway safety agency has opened yet another investigation into automated driving systems.
In the crashes, the Waymo vehicles hit stationary objects such as gates, chains or parked vehicles. Some of the incidents happened shortly after the Waymo driving system behaved unexpectedly near traffic control devices, according to the documents.
Waymo said NHTSA plays an important role in road safety, and it will continue working with the agency “as part of our mission to become the world’s most trusted driver.”
The company said it makes over 50,000 weekly trips with riders in challenging environments. “We are proud of our performance and safety record over tens of millions of autonomous miles driven, as well as our demonstrated commitment to safety transparency,” the statement said.
Waymo, based in Mountain View, California, has been operating robotaxis without human safety drivers in Arizona and California.
Michael Brooks, executive director of the nonprofit Center for Auto Safety, said NHTSA’s more aggressive actions show that autonomous vehicles may not be ready yet for public roads.
The agency’s only enforcement power on autonomous vehicles, at present, is to open investigations and seek recalls, which it is doing, Brooks said. NHTSA has been criticized in the past for being slow to regulate Tesla and other companies that offer automated driving systems, but Brooks said things appear to have changed.
“Ultimately I think it’s a good thing here that they’re taking these steps, trying to figure out why these vehicles are acting the way they are,” Brooks said.
NHTSA said it would investigate the 22 incidents involving Waymo’s fifth generation driving system plus similar scenarios “to more closely assess any commonalities in these incidents.”
The agency said it understands that Waymo’s automated driving system was engaged throughout each incident, or in some cases involving a test vehicle, a human driver disengaged the system just before an accident happened.
The probe will evaluate the system’s performance in detecting and responding to traffic control devices, and in avoiding crashes with stationary and semi-stationary objects and vehicles, the documents said.
Since late April, NHTSA has opened investigations into collisions involving self-driving vehicles run by Amazon-owned Zoox , as well as partially automated driver-assist systems offered by Tesla and Ford .
In 2021 the agency ordered all companies with self-driving vehicles or partially automated systems to report all crashes to the government. The probes rely heavily on data reported by the automakers under that order.
NHTSA also is investigating General Motors’ Cruise autonomous vehicle unit after getting reports that the vehicles may not have used proper caution around pedestrians. Cruise recalled its cars to update software after one of them dragged a pedestrian to the side of a San Francisco street in early October.
The agency also has questioned whether a recall last year of Tesla’s Autopilot driver-assist system was effective enough to make sure human drivers are paying attention. NHTSA said it ultimately found 467 crashes involving Autopilot resulting in 54 injuries and 14 deaths.
In the Ford investigation, the agency is looking into two nighttime crashes on freeways that killed three people.
The agency also pressured Tesla into recalling its “Full Self Driving” system last year because it can misbehave around intersections and doesn’t always follow speed limits.
Despite their names, neither Tesla’s Autopilot nor its “Full Self Driving” systems can drive vehicles themselves, and the company says human drivers must be ready to intervene at all times.
In addition, NHTSA has moved to set performance standards for automatic emergency braking systems , requiring them to brake quickly to avoid pedestrians and other vehicles.
The standards come after other investigations involving automatic braking systems from Tesla, Honda and Fisker because they can brake for no reason, increasing the risk of a crash.
In a 2022 interview, then NHTSA Administrator Steven Cliff said the agency would step up scrutiny of automated vehicles, and the agency recently has taken more action. NHTSA has been without a Senate-confirmed administrator since Cliff left for the California Air Resources board in August of 2022.
COMMENTS
The existing literature on scaled self-driving cars appears to be scattered and covers only some of the relevant aspects of the topic. To the best of our knowledge, only the work of Betz et al. (2022) provides an overview of studies involving scaled self-driving cars, though it focuses solely on autonomous vehicle racing. Therefore, there is a need to synthesize and evaluate what is currently ...
The paper is based on an exhaustive literature review and on the information gathered by the authors during the visits to top research centers in Germany and Switzerland, and it is complemented by authors' perception regarding AVs future evolution. ... Shladover, S.E., 2016. The truth about self-driving cars. Scientific American 314.6, 52-57 ...
to autonomous driving. [10] Understanding autonomous vehicles: A systematic literature review on capability, impact, planning, and policy This paper includes a review of the existing base to understand the impact, policy issues, and planning reveals trajectories of possible gaps in the literature. It also concludes by advocating the necessities of
This systematic literature review provides an overview of the literature surrounding small-scale self-driving cars, summarizing the current autonomous platforms deployed and focusing on the software and hardware developments in this field. The studies published in English-language journals or conference papers that present small-scale testing ...
Autonomous vehicles (AVs) or self-driving cars have the potential to provide many benefits such as improving mobility and reducing the energy and emissions consumed, travel time, and vehicle ownership. Thus, in the last few years, both research and industry have put significant efforts to develop AVs. However, laws and regulations are not ready yet for this switch and the legal sector is ...
car, self-driving car or driverless car (Spyropoulou, Penttinen, Karlaftis, Vaa, & Golias, 2008; Chong et ... Understanding autonomous vehicles: A systematic literature review 47 2 Autonomous vehicles in a nutshell 2.1 Historical background Vehicle automation was originally envisioned as early as in 1918 (Pendleton et al., 2017), and the first ...
Abstract. For decades the development of self-driving cars has been a major focus of many technologists and researchers since the 1920's, which certainly gave rise to various features like auto ...
The introduction of self-driving vehicles gives rise to a large number of ethical issues that go beyond the common, extremely narrow, focus on improbable dilemma-like scenarios. This article provides a broad overview of realistic ethical issues related to self-driving vehicles. Some of the major topics covered are as follows: Strong opinions for and against driverless cars may give rise to ...
Today's self-driving vehicles have achieved impressive driving capabilities, but still suffer from uncertain performance in long-tail cases. Training a reinforcement-learning-based self-driving ...
Autonomous cars are considered to be the next disruptive innovation that will affect consumers. It can be expected that not only traditional automakers will enter this market (e.g., Ford) but also technology companies (e.g., Google) and newer companies dedicated to self-driving cars (e.g., Tesla). We take a brand extension perspective and analyze to what extent consumers prefer autonomous cars ...
1 For a previous review focusing on crashes with self-driving cars, see Nyholm (2018b ... alistic examples in this literature) the car ... Self-driving cars more likely to drive into black people ...
This is similar to the self-driving car accident by Uber. Eight different scenarios were modified − 2 (victim survived vs. victim died) × 2 (human vs. AI driver) × 2 (female vs. male driver) to fit the experimental design. This story was based on an accident that occurred in Arizona with a self-driving car (Wakabayashi, 2018).
There is a growing interest in developing user interfaces of self-driving cars or automated vehicles which are also known as driverless cars. The literature on Self-driving cars has steadily been growing. However, there has not been any effort to systematically select, review, and synthesize the literature on this topic. A systematic literature review is conducted that reports different ...
Self-Driving Cars: A Survey. We survey research on self-driving cars published in the literature focusing on autonomous cars developed since the DARPA challenges, which are equipped with an autonomy system that can be categorized as SAE level 3 or higher. The architecture of the autonomy system of self-driving cars is typically organized into ...
With self-driving vehicles no longer a pipe-dream of science fiction comes the growing pains of the new technology. Tesla Motors is the industry leader in implementing new self-driving technologies.
Self-driving cars are coming closer and closer to being fact not fiction, but are we ready for them? In this research we analyze the current status in place for self-driving cars. We address the gaps that need to be filled, and we identify the questions that need to be answered before having self-driving cars on the road becomes a reality. Towards this, we discuss four issues with self-driving ...
This study presents an unprecedented systematic literature review on the significance of autonomous technologies in the transportation of humans, goods, and services by torch lighting research articles via using search keywords such as autonomous vehicles, self-driving vehicles, and automated vehicle technology using the Web of Science, Scopus ...
Abstract. This paper presents a scientometric and bibliometric analysis of research and innovation on self-driving cars. Through an examination of quantitative empirical evidence, we explore the importance of Artificial Intelligence (AI) as machine learning, deep learning and data mining on self-driving car research and development as measured by patents and papers.
Many recent technological advances have helped to pave the way forward for fully autonomous vehicles. This special issue explores three aspects of the self-driving car revolution: a historical perspective with a focus on perception for autonomous vehicles, how government policy will impact self-driving cars technically and commercially, and how cloud-based infrastructure plays a role in the ...
Due to the complexity of the driving environment and the dynamics of the behavior of traffic participants, self-driving in dense traffic flow is very challenging. Traditional methods usually rely on predefined rules, which are difficult to adapt to various driving scenarios. Deep reinforcement learning (DRL) shows advantages over rule-based methods in complex self-driving environments ...
With the increased implementation of self-driving cars on public roads, crashes and deaths caused by these vehicles have highlighted the complex matter of liability in these circumstances. The discussion of trials and cases surrounding deaths by autonomous vehicles illuminates how responsibility is deferred from the car manufacturer and placed primarily on the human behind the wheel.
According to a 2020 Annual Review of Public Health review of the literature, self-driving cars "could increase some health risks (such as air pollution, noise, and sedentarism); however, if properly regulated, AVs will likely reduce morbidity and mortality from motor vehicle crashes and may help reshape cities to promote healthy urban ...
The IAC brought 170-mph head-to-head racing to Las Vegas Motor Speedway at CES in January 2022, and by April the same year, the winning team PoliMOVE (Politecnico di Milano and the University of ...
With fully self-driving capability at Level 5, the car drives itself under any conditions and on any road. These vehicles do not need steering wheels or pedals. At this point, Level 5 systems are ...
In this paper, we survey research on self-driving cars published in the literature focusing on self-driving cars developed since the DARPA challenges, which are equipped with an autonomy system that can be categorized as SAE level 3 or higher (SAE, 2018). The architecture of the autonomy system of self-driving cars is typically organized into ...
A Bolt-Size Car With Hyundai and Lincoln Cues. The Dolphin is a one-box subcompact hatch, similar in dimensions to Chevrolet's Bolt EV, with Hyundai Ioniq 5-like body-side creases and a front end ...
Self-driving cars can sense what's happening around them with three main features: radar, cameras, and laser-based light detection (LiDar) . These three features act like eyes for the car and ...
In the probe of Waymo, which was once Google's self-driving vehicle unit, the agency said it has reports of 17 crashes and five other reports of possible traffic law violations. No injuries were reported. ... Cruise recalled its cars to update software after one of them dragged a pedestrian to the side of a San Francisco street in early October.
The results show that 84.4% of the respondents are willing to accept driverless cars. At this early stage, the reports from mass media significantly influence people's perception of self-driving cars. The media affect self-efficacy and subjective norms, and thereby people's trust and behavior change.