Thank you for visiting nature.com. You are using a browser version with limited support for CSS. To obtain the best experience, we recommend you use a more up to date browser (or turn off compatibility mode in Internet Explorer). In the meantime, to ensure continued support, we are displaying the site without styles and JavaScript.
- View all journals
- My Account Login
- Explore content
- About the journal
- Publish with us
- Sign up for alerts
- Open access
- Published: 16 February 2022

Magnetic control of tokamak plasmas through deep reinforcement learning
- Jonas Degrave ORCID: orcid.org/0000-0002-2738-6500 1 na1 ,
- Federico Felici ORCID: orcid.org/0000-0001-7585-376X 2 na1 ,
- Jonas Buchli 1 na1 ,
- Michael Neunert ORCID: orcid.org/0000-0003-2080-8376 1 na1 ,
- Brendan Tracey ORCID: orcid.org/0000-0001-5724-5912 1 na1 ,
- Francesco Carpanese 1 , 2 na1 ,
- Timo Ewalds 1 na1 ,
- Roland Hafner ORCID: orcid.org/0000-0001-8061-8828 1 na1 ,
- Abbas Abdolmaleki 1 ,
- Diego de las Casas 1 ,
- Craig Donner 1 ,
- Leslie Fritz 1 ,
- Cristian Galperti 2 ,
- Andrea Huber ORCID: orcid.org/0000-0002-4431-8171 1 ,
- James Keeling 1 ,
- Maria Tsimpoukelli 1 ,
- Jackie Kay 1 ,
- Antoine Merle 2 ,
- Jean-Marc Moret 2 ,
- Seb Noury 1 ,
- Federico Pesamosca 2 ,
- David Pfau 1 ,
- Olivier Sauter 2 ,
- Cristian Sommariva 2 ,
- Stefano Coda 2 ,
- Basil Duval 2 ,
- Ambrogio Fasoli 2 ,
- Pushmeet Kohli 1 ,
- Koray Kavukcuoglu 1 ,
- Demis Hassabis ORCID: orcid.org/0000-0003-2812-9917 1 &
- Martin Riedmiller ORCID: orcid.org/0000-0002-8465-5690 1 na1
Nature volume 602 , pages 414–419 ( 2022 ) Cite this article
212k Accesses
238 Citations
2438 Altmetric
Metrics details
- Computer science
- Magnetically confined plasmas
- Nuclear fusion and fission
Nuclear fusion using magnetic confinement, in particular in the tokamak configuration, is a promising path towards sustainable energy. A core challenge is to shape and maintain a high-temperature plasma within the tokamak vessel. This requires high-dimensional, high-frequency, closed-loop control using magnetic actuator coils, further complicated by the diverse requirements across a wide range of plasma configurations. In this work, we introduce a previously undescribed architecture for tokamak magnetic controller design that autonomously learns to command the full set of control coils. This architecture meets control objectives specified at a high level, at the same time satisfying physical and operational constraints. This approach has unprecedented flexibility and generality in problem specification and yields a notable reduction in design effort to produce new plasma configurations. We successfully produce and control a diverse set of plasma configurations on the Tokamak à Configuration Variable 1 , 2 , including elongated, conventional shapes, as well as advanced configurations, such as negative triangularity and ‘snowflake’ configurations. Our approach achieves accurate tracking of the location, current and shape for these configurations. We also demonstrate sustained ‘droplets’ on TCV, in which two separate plasmas are maintained simultaneously within the vessel. This represents a notable advance for tokamak feedback control, showing the potential of reinforcement learning to accelerate research in the fusion domain, and is one of the most challenging real-world systems to which reinforcement learning has been applied.
Similar content being viewed by others

Avoiding fusion plasma tearing instability with deep reinforcement learning
Jaemin Seo, SangKyeun Kim, … Egemen Kolemen

Predicting disruptive instabilities in controlled fusion plasmas through deep learning
Julian Kates-Harbeck, Alexey Svyatkovskiy & William Tang

GS-DeepNet: mastering tokamak plasma equilibria with deep neural networks and the Grad–Shafranov equation
Semin Joung, Y.-C. Ghim, … S. W. Yoon
Tokamaks are torus-shaped devices for nuclear fusion research and are a leading candidate for the generation of sustainable electric power. A main direction of research is to study the effects of shaping the distribution of the plasma into different configurations 3 , 4 , 5 to optimize the stability, confinement and energy exhaust, and, in particular, to inform the first burning-plasma experiment, ITER. Confining each configuration within the tokamak requires designing a feedback controller that can manipulate the magnetic field 6 through precise control of several coils that are magnetically coupled to the plasma to achieve the desired plasma current, position and shape, a problem known as the tokamak magnetic control problem.
The conventional approach to this time-varying, non-linear, multivariate control problem is to first solve an inverse problem to precompute a set of feedforward coil currents and voltages 7 , 8 . Then, a set of independent, single-input single-output PID controllers is designed to stabilize the plasma vertical position and control the radial position and plasma current, all of which must be designed to not mutually interfere 6 . Most control architectures are further augmented by an outer control loop for the plasma shape, which involves implementing a real-time estimate of the plasma equilibrium 9 , 10 to modulate the feedforward coil currents 8 . The controllers are designed on the basis of linearized model dynamics, and gain scheduling is required to track time-varying control targets. Although these controllers are usually effective, they require substantial engineering effort, design effort and expertise whenever the target plasma configuration is changed, together with complex, real-time calculations for equilibrium estimation.
A radically new approach to controller design is made possible by using reinforcement learning (RL) to generate non-linear feedback controllers. The RL approach, already used successfully in several challenging applications in other domains 11 , 12 , 13 , enables intuitive setting of performance objectives, shifting the focus towards what should be achieved, rather than how. Furthermore, RL greatly simplifies the control system. A single computationally inexpensive controller replaces the nested control architecture, and an internalized state reconstruction removes the requirement for independent equilibrium reconstruction. These combined benefits reduce the controller development cycle and accelerate the study of alternative plasma configurations. Indeed, artificial intelligence has recently been identified as a ‘Priority Research Opportunity’ for fusion control 14 , building on demonstrated successes in reconstructing plasma-shape parameters 15 , 16 , accelerating simulations using surrogate models 17 , 18 and detecting impending plasma disruptions 19 . RL has not, however, been used for magnetic controller design, which is challenging due to high-dimensional measurements and actuation, long time horizons, rapid instability growth rates and the need to infer the plasma shape through indirect measurements.
In this work, we present an RL-designed magnetic controller and experimentally verify its performance on a tokamak. The control policies are learned through interaction with a tokamak simulator and are shown to be directly capable of tokamak magnetic control on hardware, successfully bridging the ‘sim-to-real’ gap. This enables a fundamental shift from engineering-driven control of a pre-designed state to artificial-intelligence-driven optimization of objectives specified by an operator. We demonstrate the effectiveness of our controllers in experiments carried out on the Tokamak à Configuration Variable (TCV) 1 , 2 , in which we demonstrate control of a variety of plasma shapes, including elongated ones, such as those foreseen in ITER, as well as advanced configurations, such as negative triangularity and ‘snowflake’ plasmas. Additionally, we demonstrate a sustained configuration in which two separate plasma ‘droplets’ are simultaneously maintained within the vessel. Tokamak magnetic control is one of the most complex real-world systems to which RL has been applied. This is a promising new direction for plasma controller design, with the potential to accelerate fusion science, explore new configurations and aid in future tokamak development.
Learning control and training architecture
Our architecture, depicted in Fig. 1 , is a flexible approach for designing tokamak magnetic confinement controllers. The approach has three main phases. First, a designer specifies objectives for the experiment, potentially accompanied by time-varying control targets. Second, a deep RL algorithm interacts with a tokamak simulator to find a near-optimal control policy to meet the specified goals. Third, the control policy, represented as a neural network, is run directly (‘zero shot’) on tokamak hardware in real time.

a , Depiction of the learning loop. The controller sends voltage commands on the basis of the current plasma state and control targets. These data are sent to the replay buffer, which feeds data to the learner to update the policy. b , Our environment interaction loop, consisting of a power supply model, sensing model, environment physical parameter variation and reward computation. c , Our control policy is an MLP with three hidden layers that takes measurements and control targets and outputs voltage commands. d – f , The interaction of TCV and the real-time-deployed control system implemented using either a conventional controller composed of many subcomponents ( f ) or our architecture using a single deep neural network to control all 19 coils directly ( e ). g , A depiction of TCV and the 19 actuated coils. The vessel is 1.5 m high, with minor radius 0.88 m and vessel half-width 0.26 m. h , A cross section of the vessel and plasma, with the important aspects labelled.
In the first phase, the experimental goal is specified by a set of objectives that can contain a wide variety of desired properties (Extended Data Table 4 ). These properties range from basic stabilization of position and plasma current to sophisticated combinations of several time-varying targets, including a precise shape outline with specified elongation, triangularity and X-point location. These objectives are then combined into a ‘reward function’ that assigns a scalar quality measure to the state at each time step. This function also penalizes the control policy for reaching undesired terminal states, as discussed below. Crucially, a well-designed reward function will be minimally specified, giving the learning algorithm maximum flexibility to attain the desired outcome.
In the second phase, a high-performance RL algorithm collects data and finds a control policy through interaction with an environment, as depicted in Fig. 1a, b . We use a simulator that has enough physical fidelity to describe the evolution of plasma shape and current, while remaining sufficiently computationally cheap for learning. Specifically, we model the dynamics governing the evolution of the plasma state under the influence of the poloidal field coil voltages using a free-boundary plasma-evolution model 20 . In this model, the currents in the coils and passive conductors evolve under the influence of externally applied voltages from the power supplies, as well as induced voltages from time-varying currents in other conductors and in the plasma itself. The plasma is, in turn, modelled by the Grad–Shafranov equation 21 , which results from the balance between the Lorentz force and the pressure gradient inside the plasma on the timescales of interest. The evolution of total plasma current I p is modelled using a lumped-circuit equation. This set of equations is solved numerically by the FGE software package 22 .
The RL algorithm uses the collected simulator data to find a near-optimal policy with respect to the specified reward function. The data rate of our simulator is markedly slower than that of a typical RL environment due to the computational requirements of evolving the plasma state. We overcome the paucity of data by optimizing the policy using maximum a posteriori policy optimization (MPO) 23 , an actor-critic algorithm. MPO supports data collection across distributed parallel streams and learns in a data-efficient way. We additionally exploit the asymmetry inherent to the actor-critic design of MPO to overcome the constraints of magnetic control. In actor-critic algorithms, the ‘critic’ learns the discounted expected future reward for various actions using the available data and the ‘actor’ uses the predictions of the critic to set the control policy. The representation of the control policy of the actor is restricted, as it must run on TCV with real-time guarantees, whereas the critic is unrestricted, as it is only used during training. We therefore use a fast, four-layer feedforward neural network in the actor (Fig. 1c ) and a much larger recurrent neural network in the critic. This asymmetry enables the critic to infer the underlying state from measurements, deal with complex state-transition dynamics over different timescales and assess the influence of system measurement and action delays. The information from the coupled dynamics is then distilled into a real-time-capable controller.
In the third phase, the control policy is bundled with the associated experiment control targets into an executable using a compiler tailored towards real-time control at 10 kHz that minimizes dependencies and eliminates unnecessary computations. This executable is loaded by the TCV control framework 24 (Fig. 1d ). Each experiment begins with standard plasma-formation procedures, in which a traditional controller maintains the location of the plasma and total current. At a prespecified time, termed the ‘handover’, control is switched to our control policy, which then actuates the 19 TCV control coils to transform the plasma shape and current to the desired targets. Experiments are executed without further tuning of the control-policy network weights after training, in other words, there is ‘zero-shot’ transfer from simulation to hardware.
The control policies reliably transfer onto TCV through several key attributes of the learning procedure, depicted in Fig. 1b . We identified an actuator and sensor model that incorporates properties affecting control stability, such as delays, measurement noise and control-voltage offsets. We applied targeted parameter variation during training across an appropriate range for the plasma pressure, current density profile and plasma resistivity through analysis of experiment data, to account for varying, uncontrolled experimental conditions. This provides robustness while ensuring performance. Although the simulator is generally accurate, there are known regions where the dynamics are known to be poorly represented. We built ‘learned-region avoidance’ into the training loop to avoid these regimes through the use of rewards and termination conditions (Extended Data Table 5 ), which halt the simulation when specified conditions are encountered. Termination conditions are also used to enforce operational limits. The control policies learn to stay within the specified limits, for example, on maximum coil current or the edge safety factor 25 .
The controllers designed by our architecture are greatly structurally simplified compared with conventional designs, as depicted in Fig. 1e, f . Instead of a series of controllers, RL-driven design creates a single network controller.
Fundamental capability demonstration
We demonstrate the capability of our architecture on control targets in real-world experiments on TCV. We first show accurate control of the fundamental qualities of plasma equilibria. We then control a wide range of equilibria with complex, time-varying objectives and physically relevant plasma configurations. Finally, we demonstrate control of a configuration with several plasma ‘droplets’ in the vessel simultaneously.
We first test the fundamental tasks of plasma control through a series of changes representative of those required for a full plasma discharge. First, from the handover at 0.0872 s, take over and stabilize I p at −110 kA. Next, ramp the plasma current to −150 kA and then elongate the plasma from 1.24 to 1.44, thereby increasing the vertical instability growth rate to 150 Hz. Next, demonstrate position control through shifting the vertical plasma position by 10 cm and then divert the plasma with control of the active X-point location (see Fig. 1h ). Finally, return the plasma to the handover condition and ramp down I p to −70 kA to shut down safely. Although accuracy requirements will generally depend on the exact experiment, a reasonable aim is to control I p to within 5 kA (3% of the final 150-kA target) and the shape to within 2 cm (8% of the vessel radial half width of 26 cm). Note that the equilibrium reconstruction used matches a visually reconstructed boundary with a typical accuracy 26 of 1 cm.
The performance of the control policy is depicted in Fig. 2 . All tasks are performed successfully, with a tracking accuracy below the desired thresholds. In the initial limited phase (0.1 s to 0.45 s), the I p root-mean-square error (RMSE) is 0.71 kA (0.59% of the target) and the shape RMSE is 0.78 cm (3% of the vessel half width). In the diverted phase (0.55 s to 0.8 s), the I p and shape RMSE are 0.28 kA and 0.53 cm, respectively (0.2% and 2.1%), yielding RMSE across the full window (0.1 s to 1.0 s) of 0.62 kA and 0.75 cm (0.47% and 2.9%). This demonstrates that our RL architecture is capable of accurate plasma control across all relevant phases of a discharge experiment.

Demonstration of plasma current, vertical stability, position and shape control. Top, target shape points with 2 cm radius (blue circles), compared with the post-experiment equilibrium reconstruction (black continuous line in contour plot). Bottom left, target time traces (blue traces) compared with reconstructed observation (orange traces), with the window of diverted plasma marked (green rectangle). Bottom right, picture inside the vessel at 0.6 s showing the diverted plasma with its legs.
Source data
Control demonstrations.
We next demonstrate the capability of our architecture to produce complex configurations for scientific study. Each demonstration has its own time-varying targets but, otherwise, uses the same architectural setup to generate a control policy, including the training and environment configuration, with only minor adjustments to the reward function (shown in Extended Data Table 3 ). Recall that, in each experiment, the plasma has low elongation before the handover, and the control policy actively modulates the plasma to the configuration of interest. Selected time slices from these experiments are shown in Fig. 3 , with further detail in Extended Data Fig. 1 and error metrics in Extended Data Table 1 .

Control demonstrations obtained during TCV experiments. Target shape points with 2 cm radius (blue circles), compared with the equilibrium reconstruction plasma boundary (black continuous line). In all figures, the first time slice shows the handover condition. a , Elongation of 1.9 with vertical instability growth rate of 1.4 kHz. b , Approximate ITER-proposed shape with neutral beam heating (NBH) entering H-mode. c , Diverted negative triangularity of −0.8. d , Snowflake configuration with a time-varying control of the bottom X-point, where the target X-points are marked in blue. Extended traces for these shots can be found in Extended Data Fig. 2.
Elongating plasmas improves their thermal confinement properties, but their increased vertical-instability growth rate complicates control. We targeted a high elongation of 1.9 with a considerable growth rate. The controller was able to produce and stabilize this elongation, as shown in Fig. 3a . We obtained a good match between the targeted and the desired elongation, with an RMSE of 0.018. We also controlled shape and plasma current to their target values, with an I p RMSE of 1.2 kA and shape RMSE of 1.6 cm. This demonstrates the capability to stabilize a high vertical-instability growth rate of more than 1.4 kHz, despite acting at only 10 kHz.
We next tested applying auxiliary heating through neutral beam injection to enter ‘H-mode’, which is desirable for having higher energy confinement time, but causes notable changes to the plasma properties. We were provided a time-varying trajectory on the basis of the proposed ITER configuration that uses such auxiliary heating. As the normalized pressure β p increases to 1.12, seen in Fig. 3b , the plasma position and current were maintained accurately, with an I p RMSE of 2.6 kA and shape RMSE of 1.4 cm. This shows that our controller can robustly adapt to a changing plasma state and can work with heated H-mode plasma under externally specified configurations.
Negative triangularity plasmas are attractive as they have favourable confinement properties without the strong edge pressure gradient typical of H-modes. We targeted a diverted configuration with triangularity of −0.8, and with X-points at both corners. We successfully achieved this configuration, shown in Fig. 3c . The triangularity was accurately matched, with an RMSE of 0.070, as were the plasma current and shape, with RMSE values of 3.5 kA and 1.3 cm, respectively. This demonstrates the ability to rapidly and directly create a configuration under active study 27 .
Snowflake configurations are researched 28 , 29 , as they distribute the particle exhaust across several strike points. A crucial parameter is the distance between the two X-points that form the divertor legs. We demonstrated our ability to control this distance, shown in Fig. 3d . The control policy first established a snowflake configuration with X-points separated by 34 cm. It then manipulated the far X-point to approach the limiting X-point, ending with a separation of 6.6 cm. The time-varying X-point targets were tracked with a combined RMSE of 3.7 cm. The plasma current and shape were maintained to high accuracy during this transition, with RMSE values of 0.50 kA and 0.65 cm, respectively. This demonstrates accurate control of a complex time-varying target with several coupled objectives.
In aggregate, these experiments demonstrate the ease with which new configurations can be explored, prove the ability of our architecture to operate in high-performance discharges and confirm the breadth of its capability. In the Methods section, we further investigate the control-policy behaviours.
New multi-domain plasma demonstration
Lastly, we demonstrate the power of our architecture to explore new plasma configurations. We test control of ‘droplets’, a configuration in which two separate plasmas exist within the vessel simultaneously. It is probably possible that existing approaches could stabilize such droplets. Nonetheless, great investment would be required to develop feedforward coil-current programming, implement real-time estimators, tune controller gains and successfully take control after plasma creation. By contrast, with our approach, we simply adjust the simulated handover state to account for the different handover condition from single-axis plasmas and define a reward function to keep the position of each droplet component steady while ramping up the domain plasma currents. This loose specification gives the architecture the freedom to choose how to best adapt the droplet shapes as I p increases to maintain stability. The architecture was able to successfully stabilize droplets over the entire 200 ms control window and ramp the current within each domain, as shown in Fig. 4 . This highlights the advantage of a general, learning-based control architecture to adapt control for previously unknown configurations.

Demonstration of sustained control of two independent droplets on TCV for the entire 200-ms control window. Left, control of I p for each independent lobe up to the same target value. Right, a picture in which the two droplets are visible, taken from a camera looking into the vessel at t = 0.55.
We present a new paradigm for plasma magnetic confinement on tokamaks. Our control design fulfils many of the hopes of the community for a machine-learning-based control approach 14 , including high performance, robustness to uncertain operating conditions, intuitive target specification and unprecedented versatility. This achievement required overcoming gaps in capability and infrastructure through scientific and engineering advances: an accurate, numerically robust simulator; an informed trade-off between simulation accuracy and computational complexity; a sensor and actuator model tuned to specific hardware control; realistic variation of operating conditions during training; a highly data-efficient RL algorithm that scales to high-dimensional problems; an asymmetric learning setup with an expressive critic but fast-to-evaluate policy; a process for compiling neural networks into real-time-capable code and deployment on a tokamak digital control system. This resulted in successful hardware experiments that demonstrate fundamental capability alongside advanced shape control without requiring fine-tuning on the plant. It additionally shows that a free-boundary equilibrium evolution model has sufficient fidelity to develop transferable controllers, offering a justification for using this approach to test control of future devices.
Efforts could further develop our architecture to quantify its robustness through analysis of the non-linear dynamics 30 , 31 , 32 and reduce training time through increased reuse of data and multi-fidelity learning 33 . Additionally, the set of control targets can be expanded, for example, to reduce target heat loads through flux expansion 5 , aided by the use ofprivileged information in the critic to avoid requiring real-time observers. The architecture can be coupled to a more capable simulator, for example, incorporating plasma pressure and current-density-evolution physics, to optimize the global plasma performance.
Our learning framework has the potential to shape future fusion research and tokamak development. Underspecified objectives can find configurations that maximize a desired performance objective or even maximize power production. Our architecture can be rapidly deployed on a new tokamak without the need to design and commission the complex system of controllers deployed today, and evaluate proposed designs before they are constructed. More broadly, our approach may enable the discovery of new reactor designs by jointly optimizing the plasma shape, sensing, actuation, wall design, heat load and magnetic controller to maximize overall performance.
Tokamak à Configuration Variable
The TCV 1 , 34 , shown in Fig. 1 , is a research tokamak at the Swiss Plasma Center, with a major radius of 0.88 m and vessel height and width of 1.50 m and 0.512 m, respectively. TCV has a flexible set of magnetic coils that enable the creation of a wide range of plasma configurations. Electron cyclotron resonance heating and neutral beam injection 35 systems provide external heating and current drive, as used in the experiment in Fig. 3b . TCV is equipped with several real-time sensors and our control policies use a subset of these sensors. In particular, we use 34 of the wire loops that measure magnetic flux, 38 probes that measure the local magnetic field and 19 measurements of the current in active control coils (augmented with an explicit measure of the difference in current between the ohmic coils). In addition to the magnetic sensors, TCV is equipped with other sensors that are not available in real time, such as the cameras shown in Figs. 2 and 4 . Our control policy consumes the magnetic and current sensors of TCV at a 10-kHz control rate. The control policy produces a reference voltage command at each time step for the active control coils.
Tokamak simulator
The coupled dynamics of the plasma and external active and passiveconductors are modelled with a free-boundary simulator, FGE 22 . The conductors are described by a circuit model in which the resistivity is considered known and constant, and the mutual inductance is computed analytically.
The plasma is assumed to be in a state of toroidally symmetric equilibrium force balance (Grad–Shafranov equation 21 ), in which the Lorentz force J × B generated from the interaction of the plasma current density, J , and the magnetic field, B , balances the plasma pressure gradient ∇ p . The transport of radial pressure and current density caused by heat and current drive sources is not modelled. Instead, the plasma radial profiles are modelled as polynomials whose coefficients are constrained by the plasma current I p plus two free parameters: the normalized plasma pressure β p , which is the ratio of kinetic pressure to the magnetic pressure, and the safety factor at the plasma axis q A , which controls the current density peakedness.
The evolution of the total plasma current I p , is described as a lumped-parameter equation on the basis of the generalized Ohm’s law for the magnetohydrodynamics model. For this model, the total plasma resistance, R p , and the total plasma self-inductance, L p , are free parameters. Finally, FGE produces the synthetic magnetic measurements that simulate the TCV sensors, which are used to learn the control policies, as discussed below.
Specific settings for the droplets
In the experiment with the droplets (Fig. 4 ), the plasma is considered pressureless, which simplifies the numerical solution of the force balance equation. Moreover, the G coil was disabled in simulation, as it was placed in open circuit during experiments (the fast radial fields it generates were deemed unnecessary for these plasmas). This experiment used an earlier model for the I p evolution designed for stationary-state plasma operation. This model has one free parameter, the radial profile of the neoclassical parallel plasma conductivity \({\sigma }_{\parallel }\) (ref. 22 ). This model was replaced with the one described above for the single-domain plasma experiment, as it better describes the evolution of I p , especially when it is changing rapidly.
Plasma parameter variation
We vary the plasma-evolution parameters introduced above during training to provide robust performance across the true but unknown condition of the plasma. The amount of variation is set within ranges identified from experimental data as shown in Extended Data Table 2 . In the single-plasma experiments, we vary the plasma resistivity R p , as well as the profile parameters β p and q A . L p is not varied, as it can be computed from a simple relation 36 . These are all independently sampled from a parameter-specific log-uniform distribution. In the experiment with droplets, we vary the initial ohmic coil current values according to a uniform distribution. We set two different values for the droplet \({\sigma }_{\parallel }\) components. We sample the log of the difference between them from a scaled beta distribution and the overall shift in the combined geometric mean from a log-uniform distribution, and then solve for the individual \({\sigma }_{\parallel }\) . Parameter values are sampled at the beginning of each episode and kept constant for the duration of the simulation. The sampled value is deliberately not exposed to the learning architecture because it is not directly measureable. Therefore, the agent is forced to learn a controller that can robustly handle all combinations of these parameters. This informed and targeted domain-randomization technique proved to be effective to find policies that track time targets for shape and I p while being robust to the injection of external heating and the edge-localized mode perturbations during high confinement mode.
Sensing and actuation
The raw sensor data on TCV go through a low-pass filtering and signal-conditioning stage 37 . We model this stage in simulation by a time delay and a Gaussian noise model, identified from data during a stationary-plasma operation phase (Extended Data Table 2 ). This sensor model (shown in Fig. 1b ) captures the relevant dynamics affecting control stability. The power-supply dynamics (also shown in Fig. 1b ) are modelled with a fixed bias and a fixed time delay identified from data, as well as a further offset varied randomly at the beginning of each episode. The values for these modifications can be found in Extended Data Table 2 . This is a conservative approximation of the true thyristor-based power supplies 37 , but captures the essential dynamics for control purposes.
The control policy can learn to be robust against very non-linear hardware-specific phenomena. For example, when the current in the active coils changes polarity and the controller requests a too low voltage, the power supplies can get ‘stuck’, erroneously providing zero output current over an extended period of time (Extended Data Fig. 4b ). This phenomenon might affect both the controller stability and the precision. To demonstrate the capability of our controller to deal with this issue, we applied ‘learned-region avoidance’ in the advanced control demonstration to indicate that currents near zero are undesirable. As a result, the control policy effectively learns to increase the voltages when changing the current polarity to avoid stuck coils on the plant (Extended Data Fig. 4c ).
Neural-network architecture
MPO 23 uses two neural-network architectures to design and optimize the policy: the critic network and the policy network. Both networks are adapted during training, but only the policy network is deployed on the plant.
For the critic network, the inputs are combined with the hyperbolic tangent function value of the last commanded action and fed to a long short-term memory (LSTM) layer 256 units wide. The outputs of the LSTM layer are then concatenated with its inputs and fed to a multilayer perceptron (MLP), that is, a stack of two densely connected hidden layers with 256 latents each. Each of the MLP layers uses an exponential linear unit non-linearity. Finally, we use a last linear layer to output the Q-value.
The policy network is restricted to a network architecture that can be evaluated on the target hardware within 50 μs to obtain the necessary 10-kHz control rate. Additionally, the network needs to perform this inference to sufficient numerical accuracy on the control system, which uses a different processor architecture from the hardware used for training. Therefore, the policy network is built as follows. We feed the inputs to a stack of a linear layer with 256 outputs. The outputs of this linear layer are normalized with a LayerNorm 38 and bounded using a hyperbolic tangent function. After this, the output is fed through a three-layer MLP using exponential linear unit non-linearity and 256 latents each. The output of this stack is fed through a final linear layer that outputs two parameters per action: one mean of the Gaussian distribution and one standard deviation of the Gaussian distribution. The standard deviation uses a softplus non-linearity to make sure it is always positive. The parameters of this Gaussian distribution over actions are the output of the neural network. Note that, for assessing the policy in simulation and executing on TCV, only the mean of the distribution is used. With this small neural network, we can perform inference within the L2 cache of the CPU on the control system.
These neural networks are initialized with the weights of a truncated normal distribution scaled with the number of inputs and a bias of zero. The exception is the last layer of the policy network, which is initialized the same way but scaled with 0.0001 (ref. 39 ). These networks are trained with an unroll length of 64 steps. For training, we used a batch size of 256 and a discount of 0.99.
Extended Data Figure 5a shows the importance of an asymmetric design between the actor network and the critic network. We compare the standard setup with a symmetric setup in which the critic is also limited by the control rate on the plant. In the standard setup, the critic network is much larger than the policy network (718,337 parameters compared with 266,280 parameters) and also uses a recurrent LSTM. In the symmetric setup, the critic is also an MLP that is about the same size as the policy (266,497 parameters). We see that the symmetric design notably underperforms the asymmetric design in learning an effective policy. We additionally find that the main benefit comes from the recurrent design in the critic to handle the non-Markovian properties of this environment. When we scale up the critic keeping the feedforward structure of the policy, we find that widening its width to 512 units (926,209 parameters) or even 1,024 units (3,425,281 parameters) still does not match the performance of the setup with the smaller but recurrent critic.
Learning loop
Our approach uses an episodic training approach in which data are collected by running the simulator with a control policy in the loop, as shown in Fig. 1a . The data from these interactions are collected in a finite-capacity first-in-first-out buffer 40 . The interaction trajectories are sampled at random from the buffer by a ‘learner’, which executes the MPO algorithm to update the control-policy parameters. During training, the executed control policy is stochastic to explore successful control options. This stochastic policy is represented by a diagonal Gaussian distribution over coil actions.
Each episode corresponds to a single simulation run that terminates either when a termination condition is hit, which we will discuss below, or when a fixed simulation time has passed in the episode. This fixed time was 0.2 s for the droplets, 0.5 s in the case of Extended Data Fig. 2a, c , and 1 s otherwise. Each episode is initialized from an equilibrium state at the preprogrammed handover time, which was reconstructed from a previous experiment on TCV.
Our training loop emulates the control frequency of 10 kHz. At each step, the policy is evaluated using the observation from the previous step. The resulting action is then applied to the simulator, which is then stepped. Observations and rewards are also collected at the 10-kHz control frequency, resulting in training data collected at 0.1 ms intervals. For our simulation, we chose a time step of 50 kHz. Hence, for each evaluation of the policy, five simulation time steps are computed. The action, that is, the desired coil voltage, is kept constant during these substeps. Data from intermediate steps are only used for checking termination conditions and are discarded afterwards. This enables choosing the control rate and simulator time step independently and, hence, setting the latter on the basis of numerical considerations.
We use a distributed architecture 41 with a single learner instance on a tensor processing unit and several actors each running an independent instance of the simulator. We used 5,000 actors in parallel for our experiments, generally resulting in training times of 1-3 days, although sometimes longer for complex target specifications. We ran a sweep on the number of actors required to stabilize a basic plasma and the results can be seen in Extended Data Fig. 5 . We see that a similar level of performance can be achieved with a large reduction in the number of actors for a moderate cost in training time.
As RL only interacts sample-wise with the environment, the policy could be fine-tuned further with data from interacting with the plant. Alternatively, one might imagine leveraging the database of past experiments performed on TCV to improve the policy. However, it is unclear if the data are sufficiently diverse, given the versatility of TCV and the fact that the same plasma configuration can be achieved by various coil-voltage configurations. Especially for previously unknown plasma shapes, no data or only very limited data are available, rendering this approach ineffective. Conversely, the simulator can directly model the dynamics for the configurations of interest. This issue in which data collection requires a good policy becomes even more pronounced if one wants to optimize a policy de novo from data, without relying on a simulator model.
Rewards and terminations
All of our experiments have several objectives that must be satisfied simultaneously. These objectives are specified as individual reward components that track an aspect of the simulation — typically, a physical quantity — and these individual components are combined into a single scalar reward value. Descriptions of the targets used are listed in Extended Data Table 4 . The target values of the objectives are often time-varying (for example, the plasma current and boundary target points), and are sent to the policy as part of the observations. This time-varying trace of targets is defined by a sequence of values at points in time, which are linearly interpolated for all time steps in between.
Shape targets for each experiment were generated using the shape generator 42 or specified manually. These points are then canonicalized to 32 equally spaced points along a spline, which are the targets that are fed to the policy. The spline is periodic for closed shapes but non-periodic for diverted shapes, ending at the X-points.
The process for combining these multiple objectives into a single scalar is as follows. First, for each objective, the difference between the actual and target values is computed, and then transformed with a non-linear function to a quality measure between 0 and 1. In the case of a vector-valued objective (for example, distance to each target-shape point), the individual differences are first merged into a single scalar through a ‘combiner’, a weighted non-linear function. Finally, a weighted combination of the individual objective-specific quality measures is computed into a single scalar reward value between 0 and 1 using a combiner as above. This (stepwise) reward is then normalized so that the maximum cumulative reward is 100 for 1 s of control. In cases in which the control policy has triggered a termination, a large negative reward is given. See Extended Data Table 5 for more details.
We typically compute the quality measure from the error using a softplus or sigmoid, which provides a non-zero learning signal early in training when the errors are large, while simultaneously encouraging precision as the policy improves. Similarly, we combine the rewards using a (weighted) smooth max or geometric mean, which gives a larger gradient to improving the worst reward, while still encouraging improving all objectives. The precise reward definitions used in each of our experiments are listed in Extended Data Table 3 and the implementations are available in the supplementary material.
Further findings
Some controllers exhibited several interesting behaviours, which are briefly mentioned here. These control behaviours hint at further potential capabilities of learned-control approaches.
External heating was applied during the experiment shown in Fig. 3b . We first ran a test experiment without heating, but with the exact same controller and objectives. This provides a simple repeatability test in the control window before heating was applied. A performance comparison is depicted in Extended Data Fig. 3 and shows that, in these two experiments, the controller performed similarly.
When given the goal to maintain only the plasma position and current, our architecture autonomously constructed a low-elongation plasma that eliminates the vertical instability mode (Extended Data Fig. 4a ), without being explicitly told to do so.
Our control architecture can naturally choose to use a varying combination of poloidal field and ohmic coils to drive the inductive voltage required for sustaining the plasma current (Extended Data Fig. 4b ), in contrast to existing control architectures that typically assume a strict separation.
Our architecture can learn to include non-linear physical and control requests by adding objectives to the goal specification. It can, for example, avoid limitations in the power supplies that occasionally cause ‘stuck’ control-coil currents when reversing polarity (Extended Data Fig. 4c ) and avoid X-points in the vessel but outside the plasma (Extended Data Fig. 4d ) when requested with high-level rewards.
We see that, for some quantities, there is a steady-state error in the target value (for example, κ in Extended Data Fig. 3 ). Future development will be towards removing such errors, for example, by making the control policy recurrent rather than feedforward. Care must be taken to ensure that these more powerful recurrent policies do not overspecialize to the specific dynamics of the simulator and continue to transfer to TCV successfully.
As the stochastic nature of the training policy is only useful for exploration, the final control policy is taken to be the mean of the Gaussian policy at the conclusion of training. This gives a deterministic policy to execute on the plant. During training, we monitor the quality of this deterministic policy before deployment.
The control loop of TCV runs at 10 kHz, although only half of the cycle time, that is, 50 μs, is available for the control algorithm due to other signal processing and logging. Therefore we created a deployment system that compiles our neural network into real-time-capable code that is guaranteed to run within this time window. To achieve this, we remove superfluous weights and computations (such as the exploration variance) and then use tfcompile 43 to compile it into binary code, carefully avoiding unnecessary dependencies. We tailored the neural network structure to optimize the use of the processor’s cache and enable vectorized instructions for optimal performance. The table of time-varying control targets is also compiled into the binary for ease of deployment. In future work, targets could easily be supplied at runtime to dynamically adjust the behaviour of the control policy. We then test all compiled policies in an automated, extensive benchmark before deployment to ensure that timings are met consistently.
Post-experiment analysis
The plasma shape and position are not directly observed and need to be inferred from the available magnetic measurements. This is done with magnetic-equilibrium reconstruction, which solves an inverse problem to find the plasma-current distribution that respects the force balance (Grad–Shafranov equation) and best matches the given experimental magnetic measurements at a specific time in a least-squares sense.
In a conventional magnetic control design, a real-time-capable magnetic-equilibrium reconstruction is needed as a plasma-shape observer to close the shape-control feedback loop (shown as the ‘Plasma shape’ observer in Fig. 1f ). In our approach, instead, we only make use of equilibrium reconstruction with LIUQE code 10 during post-discharge analysis to validate the plasma-shape controller performances and compute the physical initial conditions for the simulation during training.
After running the experiment, we use this equilibrium-reconstruction code to obtain an estimate of the plasma state and magnetic flux field. Using this approach is consistent with previous literature for evaluating performance 9 , 10 .
The plasma boundary is defined by the last closed-flux surface (LCFS) in the domain. We extract the LCFS as 32 equiangular points around the plasma axis and then canonicalize with splines to 128 equidistant points. The error distance is computed using the shortest distance between each of the points that defined the target shape and the polygon defined by the 128 points on the LCFS. The shape RMSE is computed across these 32 error distances over all time steps in the time range of interest.
Errors on scalar quantities, such as I p or elongation, are computed from the error between the reference and the respective estimation from the equilibrium reconstruction over the time period of interest. The estimate of the growth rate of the vertical displacement instability 6 is computed from a spectral decomposition of the linearized system of equations of the simulator around the reconstructed equilibrium.
Comparison with previous work
In recent years, advanced control techniques have been applied to magnetic confinement control. De Tommasi et al. 44 describe a model-based control approach for plasma-position control using a linear model and a cascaded feedback-control structure. Gerkšič and De Tommasi 45 propose a model predictive control approach, demonstrating linear model predictive control for plasma position and shape control in simulation, including a feasibility estimate for hardware deployment. Boncagni et al. 46 have proposed a switching controller, improving on plasma-current tracking on hardware but without demonstrating further capabilities. There has been other previous work in which RL has learned on plasma models, for example, to control the safety factor 47 or to control the ion-temperature gradient 48 . Recently, Seo et al. 49 have developed feedforward signals for beta control using RL, which have then been verified on the KSTAR tokamak.
More generally, machine-learning-based approaches are being developed for magnetic-confinement control and fusion in general, not limited to control. A survey of this area is provided by Humphreys et al. 14 , who categorized approaches into seven Priority Research Opportunities, including accelerating science, diagnostics, model extraction, control, large data, prediction and platform development. Early use of neural networks in a control loop for plasma control is presented by Bishop et al. 15 , who used a small-scale neural network to estimate the plasma position and low-dimensional shape parameters, which were subsequently used as error signals for feedback control.
Our architecture constitutes an important step forward in terms of generality, in which a single framework is used to solve a broad variety of fusion-control challenges, satisfying several of the key promises of machine learning and artificial intelligence for fusion set out in ref. 14 .
Application to alternative tokamaks
Our approach has been successfully demonstrated on TCV, and we are confident that, with a few basic modifications, our approach is directly applicable to other tokamaks that meet some assumptions and technical requirements laid out below. All present-day tokamaks have been confirmed to respect, from the magnetic control point of view, the coupled equations solved by free-boundary simulators. Equilibrium controllers have routinely been designed on the basis of these models, and — for future tokamaks — there is no reason as of yet to believe this model will no longer be valid. Naturally, we cannot predict the performance of our approach on other kinds of devices.
To simulate a different device, the free-boundary simulator parameters will need to be set appropriately. This includes the machine description with the locations and electrical properties of coils, vessel and limiter, the actuator and sensor characteristics, such as current and voltage ranges, noise and delay. Operational conditions such as the expected range of variation of profile parameters also need to be determined. Finally, rewards and targets need to be updated to match the geometry and desired shapes.
The aforementioned characteristics should be readily available, as these are typically part of the design process for a given tokamak. Indeed, Grad–Shafranov equilibrium calculations are routinely carried out for the general design and analysis of a new tokamak, and these include all required parameters. These variations in vessel geometry and the number, placement and range of sensors and coils should not require changes to the learning algorithm beyond adjusting design bounds. The learning algorithm will automatically adjust input and output layer dimensions for the neural network and will automatically learn a policy suited to the new vessel and control system.
Further considerations are required for deployment. Our approach requires a centralized control system with sufficient computational power to evaluate a neural network at the desired control frequency, although a desktop-grade CPU is sufficient to meet this requirement. Also, an existing magnetic controller is needed to perform plasma breakdown and early ramp-up before handing over to the learned controller. Although our controllers are trained to avoid terminations in simulation corresponding to disruption criteria, they are not guaranteed to avoid plasma disruptions. Hence, if the target tokamak cannot tolerate certain kinds of disruptions, a machine-protection layer such as a simpler fallback controller or interlock system should be in place during experiments.
Data availability
TCV experimental data from the images in this paper are available in the Supplementary information. Source data are provided with this paper.
Code availability
The learning algorithm used in the actor-critic RL method is MPO 23 , a reference implementation of which is available under an open-source license 41 . Additionally, the software libraries launchpad 50 , dm_env 51 , sonnet 52 , tensorflow 53 and reverb 40 were used, which are also available as open source. The code to compute the control targets, rewards and terminations is available in the Supplementary information. FGE and LIUQE are available subject to license agreement from the Swiss Plasma Center at EPFL (Antoine Merle [email protected], Federico Felici [email protected]).
Hofmann, F. et al. Creation and control of variably shaped plasmas in TCV. Plasma Phys. Control. Fusion 36 , B277 (1994).
Article ADS CAS Google Scholar
Coda, S. et al. Physics research on the TCV tokamak facility: from conventional to alternative scenarios and beyond. Nucl. Fusion 59 , 112023 (2019).
Anand, H., Coda, S., Felici, F., Galperti, C. & Moret, J.-M. A novel plasma position and shape controller for advanced configuration development on the TCV tokamak. Nucl. Fusion 57 , 126026 (2017).
Article ADS Google Scholar
Mele, A. et al. MIMO shape control at the EAST tokamak: simulations and experiments. Fusion Eng. Des. 146 , 1282–1285 (2019).
Article CAS Google Scholar
Anand, H. et al. Plasma flux expansion control on the DIII-D tokamak. Plasma Phys. Control. Fusion 63 , 015006 (2020).
De Tommasi, G. Plasma magnetic control in tokamak devices. J. Fusion Energy 38 , 406–436 (2019).
Article Google Scholar
Walker, M. L. & Humphreys, D. A. Valid coordinate systems for linearized plasma shape response models in tokamaks. Fusion Sci. Technol. 50 , 473–489 (2006).
Blum, J., Heumann, H., Nardon, E. & Song, X. Automating the design of tokamak experiment scenarios. J. Comput. Phys. 394 , 594–614 (2019).
Article ADS MathSciNet Google Scholar
Ferron, J. R. et al. Real time equilibrium reconstruction for tokamak discharge control. Nucl. Fusion 38 , 1055 (1998).
Moret, J.-M. et al. Tokamak equilibrium reconstruction code LIUQE and its real time implementation. Fusion Eng. Des. 91 , 1–15 (2015).
Xie, Z., Berseth, G., Clary, P., Hurst, J. & van de Panne, M. Feedback control for Cassie with deep reinforcement learning. In 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 1241–1246 (IEEE, 2018).
Akkaya, I. et al. Solving Rubik’s cube with a robot hand. Preprint at https://arxiv.org/abs/1910.07113 (2019).
Bellemare, M. G. et al. Autonomous navigation of stratospheric balloons using reinforcement learning. Nature 588 , 77–82 (2020).
Humphreys, D. et al. Advancing fusion with machine learning research needs workshop report. J. Fusion Energy 39 , 123–155 (2020).
Bishop, C. M., Haynes, P. S., Smith, M. E., Todd, T. N. & Trotman, D. L. Real time control of a tokamak plasma using neural networks. Neural Comput. 7 , 206–217 (1995).
Joung, S. et al. Deep neural network Grad-Shafranov solver constrained with measured magnetic signals. Nucl. Fusion 60 , 16034 (2019).
van de Plassche, K. L. et al. Fast modeling of turbulent transport in fusion plasmas using neural networks. Phys. Plasmas 27 , 022310 (2020).
Abbate, J., Conlin, R. & Kolemen, E. Data-driven profile prediction for DIII-D. Nucl. Fusion 61 , 046027 (2021).
Kates-Harbeck, J., Svyatkovskiy, A. & Tang, W. Predicting disruptive instabilities in controlled fusion plasmas through deep learning. Nature 568 , 526–531 (2019).
Jardin, S. Computational Methods in Plasma Physics (CRC Press, 2010).
Grad, H. & Rubin, H. Hydromagnetic equilibria and force-free fields. J. Nucl. Energy (1954) 7 , 284–285 (1958).
Carpanese, F. Development of Free-boundary Equilibrium and Transport Solvers for Simulation and Real-time Interpretation of Tokamak Experiments . PhD thesis, EPFL (2021).
Abdolmaleki, A. et al. Relative entropy regularized policy iteration. Preprint at https://arxiv.org/abs/1812.02256 (2018).
Paley, J. I., Coda, S., Duval, B., Felici, F. & Moret, J.-M. Architecture and commissioning of the TCV distributed feedback control system. In 2010 17th IEEE - NPSS Real Time Conference 1–6 (IEEE, 2010).
Freidberg, J. P. Plasma Physics and Fusion Energy (Cambridge Univ. Press, 2008).
Hommen, G. D. et al. Real-time optical plasma boundary reconstruction for plasma position control at the TCV Tokamak. Nucl. Fusion 54 , 073018 (2014).
Austin, M. E. et al. Achievement of reactor-relevant performance in negative triangularity shape in the DIII-D tokamak. Phys. Rev. Lett. 122 , 115001 (2019).
Kolemen, E. et al. Initial development of the DIII–D snowflake divertor control. Nucl. Fusion 58 , 066007 (2018).
Anand, H. et al. Real time magnetic control of the snowflake plasma configuration in the TCV tokamak. Nucl. Fusion 59 , 126032 (2019).
Wigbers, M. & Riedmiller, M. A new method for the analysis of neural reference model control. In Proc. International Conference on Neural Networks (ICNN’97) Vol. 2, 739–743 (IEEE, 1997).
Berkenkamp, F., Turchetta, M., Schoellig, A. & Krause, A. Safe model-based reinforcement learning with stability guarantees. In 2017 Advances in Neural Information Processing Systems 908–919 (ACM, 2017).
Wabersich, K. P., Hewing, L., Carron, A. & Zeilinger, M. N. Probabilistic model predictive safety certification for learning-based control. IEEE Tran. Automat. Control 67 , 176–188 (2021).
Article MathSciNet Google Scholar
Abdolmaleki, A. et al. On multi-objective policy optimization as a tool for reinforcement learning. Preprint at https://arxiv.org/abs/2106.08199 (2021).
Coda, S. et al. Overview of the TCV tokamak program: scientific progress and facility upgrades. Nucl. Fusion 57 , 102011 (2017).
Karpushov, A. N. et al. Neutral beam heating on the TCV tokamak. Fusion Eng. Des. 123 , 468–472 (2017).
Lister, J. B. et al. Plasma equilibrium response modelling and validation on JT-60U. Nucl. Fusion 42 , 708 (2002).
Lister, J. B. et al. The control of tokamak configuration variable plasmas. Fusion Technol. 32 , 321–373 (1997).
Ulyanov, D., Vedaldi, A. & Lempitsky, V. Instance normalization: the missing ingredient for fast stylization. Preprint at https://arxiv.org/abs/1607.08022 (2016).
Andrychowicz, M. et al. What matters in on-policy reinforcement learning? A large-scale empirical study. In ICLR 2021 Ninth International Conference on Learning Representations (2021).
Cassirer, A. et al. Reverb: a framework for experience replay. Preprint at https://arxiv.org/abs/2102.04736 (2021).
Hoffman, M. et al. Acme: a research framework for distributed reinforcement learning. Preprint at https://arxiv.org/abs/2006.00979 (2020).
Hofmann, F. FBT-a free-boundary tokamak equilibrium code for highly elongated and shaped plasmas. Comput. Phys. Commun. 48 , 207–221 (1988).
Abadi, M. et al. TensorFlow: a system for large-scale machine learning. In Proc . 12th USENIX Symposium on Operating Systems Design and Implementation (OSDI ’16) 265–283 (2016).
De Tommasi, G. et al. Model-based plasma vertical stabilization and position control at EAST. Fusion Eng. Des. 129 , 152–157 (2018).
Gerkšič, S. & De Tommasi, G. ITER plasma current and shape control using MPC. In 2016 IEEE Conference on Control Applications (CCA) 599–604 (IEEE, 2016).
Boncagni, L. et al. Performance-based controller switching: an application to plasma current control at FTU. In 2015 54th IEEE Conference on Decision and Control (CDC) 2319–2324 (IEEE, 2015).
Wakatsuki, T., Suzuki, T., Hayashi, N., Oyama, N. & Ide, S. Safety factor profile control with reduced central solenoid flux consumption during plasma current ramp-up phase using a reinforcement learning technique. Nucl. Fusion 59 , 066022 (2019).
Wakatsuki, T., Suzuki, T., Oyama, N. & Hayashi, N. Ion temperature gradient control using reinforcement learning technique. Nucl. Fusion 61 , 046036 (2021).
Seo, J. et al. Feedforward beta control in the KSTAR tokamak by deep reinforcement learning. Nucl. Fusion 61 , 106010 (2021).
Yang, F. et al. Launchpad: a programming model for distributed machine learning research. Preprint at https://arxiv.org/abs/2106.04516 (2021).
Muldal, A. et al. dm_env: a Python interface for reinforcement learning environments. http://github.com/deepmind/dm_env (2019).
Reynolds, M. et al. Sonnet: TensorFlow-based neural network library. http://github.com/deepmind/sonnet (2017).
Martín A. et al. TensorFlow: large-scale machine learning on heterogeneous systems. Software available from https://www.tensorflow.org/ 2015.
Hender, T. C. et al. Chapter 3: MHD stability, operational limits and disruptions. Nucl. Fusion 47 , S128–S202 (2007).
Download references
Acknowledgements
We gratefully acknowledge the work and support of the TCV team (see the author list of Coda et al. 2 ) in enabling these experimental results. We thank C. Wüthrich and Y. Andrebe for support with the diagnostics. We thank C. Jones and E. Smith for strategic help and inspiration at the start of the project. We thank R. Ahamed, P. Komarek, V. Panneershelvam and F. Song for their support in the preparation and during this research. This work was supported in part by the Swiss National Science Foundation.
Author information
These authors contributed equally: Jonas Degrave, Federico Felici, Jonas Buchli, Michael Neunert, Brendan Tracey, Francesco Carpanese, Timo Ewalds, Roland Hafner, Martin Riedmiller
Authors and Affiliations
DeepMind, London, UK
Jonas Degrave, Jonas Buchli, Michael Neunert, Brendan Tracey, Francesco Carpanese, Timo Ewalds, Roland Hafner, Abbas Abdolmaleki, Diego de las Casas, Craig Donner, Leslie Fritz, Andrea Huber, James Keeling, Maria Tsimpoukelli, Jackie Kay, Seb Noury, David Pfau, Pushmeet Kohli, Koray Kavukcuoglu, Demis Hassabis & Martin Riedmiller
Swiss Plasma Center - EPFL, Lausanne, Switzerland
Federico Felici, Francesco Carpanese, Cristian Galperti, Antoine Merle, Jean-Marc Moret, Federico Pesamosca, Olivier Sauter, Cristian Sommariva, Stefano Coda, Basil Duval & Ambrogio Fasoli
You can also search for this author in PubMed Google Scholar
Contributions
B.T., F.C., F.F., J.B., J.D., M.N., M.R., R.H. and T.E. contributed equally. D.P., F.F., J.B., J.D., M.R. and R.H. conceived the project. A.H., B.T., F.F., J.B., J.D., L.F., M.N. and M.R. led the project. A.M., B.T., C.D., C.S., F.C., F.F., F.P., J.B., J.-M.M., M.N. and O.S. developed the physics simulations. B.T., C.D., D.C., F.F., J.D., J. Kay, M.N., M.T. and T.E. integrated the physics simulations with the learning framework. A.A., B.T., J.D., J. Keeling, R.H. and T.E. developed the learning framework and performed learning experiments. C.G., D.C., F.F., J.B., J.D., M.N., S.N. and T.E. developed the real-time neural network interface. C.G., F.C., F.F., J.D. and S.C. integrated the real-time neural network with the control system and ran tokamak experiments. C.D., D.C., F.C., F.F., J.B., J. Keeling, M.N. and T.E. developed data-curation tools. B.T., C.G., F.C., F.F., J.B., J. Keeling, M.N., R.H. and T.E. developed and ran the data analysis. A.F., B.D., D.H., S.C., K.K. and P.K. consulted for the project. B.T., F.C., F.F., J.B., J.D., M.N., M.R., R.H. and T.E. wrote the manuscript.
Corresponding authors
Correspondence to Federico Felici , Jonas Buchli or Brendan Tracey .
Ethics declarations
Competing interests.
B.T., F.C., F.F., J.B., J.D., M.N., R.H. and T.E. have filed a provisional patent application about the contents of this manuscript. The remaining authors declare no competing interests.
Peer review
Peer review information.
Nature thanks Takuma Wakatsuki and the other, anonymous, reviewers for their contribution to the peer review of this work.
Additional information
Publisher’s note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Extended data figures and tables
Extended data fig. 1 pictures and illustration of the tcv..
a, b Photographs showing the part of the TCV inside the bioshield. c CAD drawing of the vessel and coils of the TCV. d View inside the TCV (Alain Herzog/EPFL), showing the limiter tiling, baffles and central column.
Extended Data Fig. 2 A larger overview of the shots in Fig. 3 .
We plotted the reconstructed values for the normalized pressure β p and safety factor q A , along with the range of domain randomization these variables saw during training (in green), which can be found in Extended Data Table 2 . We also plot the growth rate, γ , and the plasma current, I p , along with the associated target value. Where relevant, we plot the elongation κ , the neutral beam heating, the triangularity δ and the vertical position of the bottom X-point Z X and its target.
Extended Data Fig. 3 Control variability.
To illustrate the variability of the performance that our deterministic controller achieves on the environment, we have plotted the trajectories of one policy that was used twice on the plant: in shot 70599 (in blue) and shot 70600 (in orange). The dotted line shows where the cross sections of the vessel are illustrated. The trajectories are shown from the handover at 0.0872 s until 0.65 s after the breakdown, after which, on shot 70600, the neutral beam heating was turned on and the two shots diverge. The green line shows the RMSE distance between the LCFS in the two experiments, providing a direct measure of the shape similarity between the two shots. This illustrates the repeatability of experiments both in shape parameters such as elongation κ and triangularity δ and in the error achieved with respect to the targets in plasma current I p and the shape of the last closed-flux surface.
Extended Data Fig. 4 Further observations.
a , When asked to stabilize the plasma without further specifications, the agent creates a round shape. The agent is in control from t = 0.45 and changes the shape while trying to attain R a and Z a targets. This discovered behaviour is indeed a good solution, as this round plasma is intrinsically stable with a growth rate γ < 0. b , When not given a reward to have similar current on both ohmic coils, the algorithm tended to use the E coils to obtain the same effect as the OH001 coil. This is indeed possible, as can be seen by the coil positions in Fig. 1g , but causes electromagnetic forces on the machine structures. Therefore, in later shots, a reward was added to keep the current in both ohmic coils close together. c , Voltage requests by the policy to avoid the E3 coil from sticking when crossing 0 A. As can be seen in, for example, Extended Data Fig. 4b , the currents can get stuck on 0 A for low voltage requests, a consequence of how these requests are handled by the power system. As this behaviour was hard to model, we introduced a reward to keep the coil currents away from 0 A. The control policy produces a high voltage request to move through this region quickly. d , An illustration of the difference in cross sections between two different shots, in which the only difference is that the policy on the right was trained with a further reward for avoiding X-points in vacuum.
Extended Data Fig. 5 Training progress.
Episodic reward for the deterministic policy smoothed across 20 episodes with parameter variations enabled, in which 100 means that all objectives are perfectly met. a comparison of the learning curve for the capability benchmark (as shown in Fig. 2 ) using our asymmetric actor-critic versus a symmetric actor-critic, in which the critic is using the same real-time-capable feedforward network as the actor. In blue is the performance with the default critic of 718,337 parameters. In orange, we show the symmetric version, in which the critic has the same feedforward structure and size (266,497 parameters) as the policy (266,280 parameters). When we keep the feedforward structure of the symmetric critic and scale up the critic, we find that widening its width to 512 units (in green, 926,209 parameters) or even 1,024 units (in red, 3,425,281 parameters) does not bridge the performance gap with the smaller recurrent critic. b comparison between using various amounts of actors for stabilizing a mildly elongated plasma. Although the policies in this paper were trained with 5,000 actors, this comparison shows that, at least for simpler cases, the same level of performance can be achieved with much lower computational resources.
Supplementary information
Supplementary information.
This file contains an overview of the files located in the accompanying zipped Supplementary Data folder.
Supplementary Data
Source data fig. 2, source data fig. 3, source data fig. 4, source data extended data fig. 2, source data extended data fig. 3, source data extended data fig. 4, source data extended data fig. 5, rights and permissions.
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this license, visit http://creativecommons.org/licenses/by/4.0/ .
Reprints and permissions
About this article
Cite this article.
Degrave, J., Felici, F., Buchli, J. et al. Magnetic control of tokamak plasmas through deep reinforcement learning. Nature 602 , 414–419 (2022). https://doi.org/10.1038/s41586-021-04301-9
Download citation
Received : 14 July 2021
Accepted : 01 December 2021
Published : 16 February 2022
Issue Date : 17 February 2022
DOI : https://doi.org/10.1038/s41586-021-04301-9
Share this article
Anyone you share the following link with will be able to read this content:
Sorry, a shareable link is not currently available for this article.
Provided by the Springer Nature SharedIt content-sharing initiative
This article is cited by
Reinforcement learning-based control for waste biorefining processes under uncertainty.
- Abigael Wahlen
- Zhaohui Tong
Communications Engineering (2024)
- SangKyeun Kim
- Egemen Kolemen
Nature (2024)
Solving real-world optimization tasks using physics-informed neural computing
Scientific Reports (2024)
First application of data assimilation-based control to fusion plasma
- Yuya Morishita
- Sadayoshi Murakami
- Masaki Osakabe
A survey on model-based reinforcement learning
- Fan-Ming Luo
Science China Information Sciences (2024)
By submitting a comment you agree to abide by our Terms and Community Guidelines . If you find something abusive or that does not comply with our terms or guidelines please flag it as inappropriate.
Quick links
- Explore articles by subject
- Guide to authors
- Editorial policies
Sign up for the Nature Briefing newsletter — what matters in science, free to your inbox daily.

- Reference Manager
- Simple TEXT file
People also looked at
Editorial article, editorial: experimental and simulation research on nuclear reactor thermal-hydraulics.

- 1 Department of Nuclear Engineering and Technology, School of Energy and Power Engineering, Chongqing University, Chongqing, China
- 2 Department of Engineering Physics, University of Wisconsin-Madison, Madison, WI, United States
- 3 Helmholtz-Zentrum Dresden-Rossendorf, Dresden, Germany
Editorial on the Research Topic Experimental and simulation research on nuclear reactor thermal-hydraulics
The researches on nuclear reactor thermal-hydraulics have achieved outstanding progresses in the past decades. In recent years, basic research on multiphase flow dynamics and corresponding measurement technology, as well as preliminary research on Gen IV reactors based on experiments and simulations are attracting more and more attention. However, the inside complicated physics and outside extreme conditions will also bring risks and challenges to the development of nuclear industry.
Prof. Liangming Pan from Chongqing University held the first annual academic meeting of the branch of Nuclear Reactor Thermal-Hydraulics and Fluid Mechanics of Chinese Nuclear Society in October 2021. Several high-quality papers were selected from this conference. Therefore, Prof. Pan proposed the Research Topic “ Experimental and Simulation Research on Nuclear Reactor Thermal-Hydraulics ” in the journal Frontiers in Energy Research . This research topic aims to promote the novel experimental and numerical investigations on relevant issues refer to nuclear reactor thermal-hydraulics, which is of great significance to the system optimization and safety evaluation of nuclear power plants. Finally, 14 articles were collected and published in this topic, covering the experimental and numerical research of thermal hydraulic problems in light water reactors to supercritical coolant reactors.
Most papers are relevant to the thermal hydraulic problems in light water reactors. Li et al. have contributed an article: “ Research on Countercurrent Flow Limitation in Reactor Hot Leg at the Loss of Coolant Accident-Thermal hydraulic Calculation with System Code RELAP5 ”. Meng et al. have presented an article entitled: “ Research of Thermal Hydraulic Conditions Effect on PWR CIPS Risk ”. Yu et al. have presented an article: “ An Innovative Investigation on Fluid-to-Fluid Modeling of Post-Dryout Heat Transfer in Thermal Energy Systems ”. Zhu et al. have contributed an article: “ Comparison of Intergroup Mass Transfer Coefficient Correlations in Two-Group IATE for Subcooled Boiling Flow ”. Ding et al. have contributed their research relevant to: “ Experimental Research of Flow Distribution at Reactor Core Inlet of ACP100 ”. Li et al. have presented article in title of “ Experimental Study on Stratification Morphology of the Molten Pool during Severe Accident ”.
Several research papers are about the supercritical coolant. Zhang et al. have contributed an article: “ Experimental Study on Prototype of Printed Circuit Heat Exchanger ”. Zhu et al. have presented an article entitled: “ Dynamic Characteristic Study of Supercritical CO 2 Recompression Brayton Cycle System ”. Min et al. have presented their research article of: “ Study of Supercritical CO 2 Physical Property Calculation Models ”.
Several articles are related to the high temperature gas-cooled reactor. Qin et al. have presented an article entitled: “ Numerical Investigation of Hot Helium Flow Homogenizer on Inter-Unit Flow Rate Uniformity of HTGR Once through Steam Generator ”. Qu et al. have contributed an article: “ Characteristics Analysis of Combined Cycle Coupled With High Temperature Gas-Cooled Reactor Based on Progressive Optimization ”.
Meanwhile, there are several articles about other issues. Wang et al. have contributed the research paper of: “ Neutronics and Thermal Hydraulics Coupling Analysis on Novel Organic Cooled Reactor Based on Single-Channel Model ”. Fang et al. have contributed an article: “ Numerical Study on Heat Transfer and Enhancement Mechanism in PCM-Filled Shell-and-Tube Heat Exchangers ”. Su et al. have contributed an article entitled: “ Development and Assessment of an Isotropic Four-Equation Model for Heat Transfer of Low Prandtl Number Fluids ”.
Through revision and update for almost 1 year, this topic finally closed with above 14 papers published in the journal Frontiers in Energy Research. This topic presents a chance to public to follow these high-quality papers selected from this conference. The journal Frontiers in Energy Research will always open to accept more papers from international conferences. All the editors are welcomed to contact the journal for further information.
Author contributions
LZ is the leading author. LP is the corresponding author. JW and WD contribute the review. All authors approved the submitted version.
Conflict of interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Publisher’s note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
Keywords: nuclear reactor, thermal, hydraulics, experiments, simulation
Citation: Zhang L, Pan L, Wang J and Ding W (2022) Editorial: Experimental and simulation research on nuclear reactor thermal-hydraulics. Front. Energy Res. 10:1028698. doi: 10.3389/fenrg.2022.1028698
Received: 26 August 2022; Accepted: 06 September 2022; Published: 23 September 2022.
Edited and reviewed by:
Copyright © 2022 Zhang, Pan, Wang and Ding. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Luteng Zhang, [email protected] ; Liangming Pan, [email protected]
This article is part of the Research Topic
Experimental and Simulation Research on Nuclear Reactor Thermal-Hydraulics
Advertisement
India’s nuclear power program: a critical review
- Published: 30 August 2022
- Volume 47 , article number 181 , ( 2022 )
Cite this article
- G Vaidyanathan ORCID: orcid.org/0000-0002-6549-4377 1 &
- R D Kale 2
377 Accesses
2 Citations
3 Altmetric
Explore all metrics
Global carbon emissions have been rising sharply since the start of the 20th century, and countries have adopted various policies in recent years to reduce greenhouse gas (GHG) emissions in different sectors. Nuclear energy is one energy source that is least polluting with minimum GHG emissions. India’s nuclear power programme started with Heavy water reactors in the first stage followed by Fast Reactors in the second stage. Third stage of Thorium utilisation is yet to start. The deployment of Pu/depleted U from Heavy water reactors in fast reactors would help in the effective utilisation of the indigenous uranium resources to a large extent besides reducing the waste. The thorium technology to obtain uranium 233 is equally important as India possesses large amounts of thorium deposits. With sufficient U233 we can provide a significant long-term solution to fuel our nuclear reactors to produce electricity needed for its development. Linked to the nuclear programme is the availability of fuel, ability to reprocess the spent fuel and manage the wastes. India’s waiver from the Nuclear Suppliers’ Group and its agreement with the global atomic energy body, IAEA, have resulted in limited breakthroughs in the nuclear sector in the last decade and allowed the import of fuel. This paper undertakes a review of the different steps taken by India in the nuclear arena and makes a realistic assessment of its current nuclear power programme.
This is a preview of subscription content, log in via an institution to check access.
Access this article
Price includes VAT (Russian Federation)
Instant access to the full article PDF.
Rent this article via DeepDyve
Institutional subscriptions
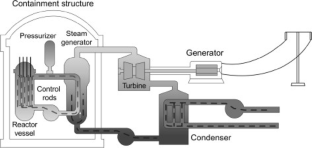
Similar content being viewed by others

Nuclear viewpoint in India
Anshu Bharadwaj, Lakshminarayana Venkat Krishnan & Subramaniam Rajagopal

Moving Ahead Towards Sustainable Development-AHWR, an Amicable Approach for Nuclear Reactors

A Critical Analysis of Nuclear Power Development in India and Uranium Demand Forecast: A Case Study
Abbreviations.
Greenhouse emissions
International Atomic Energy Agency
Department of Atomic Energy India
Pressurised heavy water reactor
Rajasthan Atomic Power Station
Pressurised water reactor
Boiling water reactor
Sodium fast reactor
Canada Deutrium
Reaktor Bolshoy Moshchnosty Kanalny
Gas cooled reactor
Fast breeder reactor
Vodo-Vodyanoi Energetichesky Reaktor
Experimental breeder reactor I
Atomic Energy Commission
Atomic Energy Establishment, Trombay
Bhabha Atomic Research Centre
Fast breeder test reactor
Atomic Energy of Canada Limited
Peaceful nuclear explosion
Mixed oxide
Madras Atomic Power Station
Nuclear fuel complex
Kakrapar Atomic Power Station
Narora Atomic Power Station
Tarapur Atomic Power Station
Nuclear Power Corporation of India
Kalpakkam mini reactor
Prototype fast breeder reactor
Compact reprocessing of advanced fuel
Fast reactor fuel cycle facility
Molten salt reactor
Advanced heavy water reactor
Evolutionary power reactor
Atomic Energy Regulatory Board
Ministry of Environment and Forests
Interest during construction
Iyer M R 2020 The Saga of Atomic Energy in India- Why is Nuclear Power still Subcritical? Authors Press, Delhi
Google Scholar
Sarma N and Banerjee B 2008 Nuclear Power in India: A Critical History. Rupa & Co., Delhi
Hart D 1983 Nuclear Power in India: A Comparative Analysis. George Allen & Unwin, London. https://doi.org/10.4324/9780429278303
Book Google Scholar
Bhardwaj SA 2013 Indian nuclear power programme—Past, present, and future , S ̄adhan ̄a 38: Part 5, pp. 775–794
Kale R D 2020 India’s fast reactor programme—A review and critical assessment. Progress Nuclear Energy 122: 103265
Article Google Scholar
Vaidyanathan G and Purniah B 2020 Energy, and Environment- from Cradle to Grave. Yes Dee Publishing, Chennai
Grover RB 2006 Role of Nuclear Energy in India’s Energy Mix, IANCAS Bulletin , April
Uwe R Fritsche et al ., Energy and Land Use, September 2017, International renewable energy Agency IRENA& UN Convention to Combat, desertification, http://iinas.org/tl_files/iinas/downloads/land/IINAS_2017_UNCCD-IRENA_Energy-Land_paper.pdf
Neumeyer C and Goldston R 2016 Dynamic EROI Assessment of the IPCC 21st Century Electricity Production Scenario Sustainability 2016, 8, 421. https://doi.org/10.3390/su8050421
IAEA-TECDOC-892, Comparison of Energy Sources in Terms of Their Full-Energy-Chain Emission Factors of Greenhouse Gases, IAEA, Vienna, 1996
Nuclear Electricity Generation: What Are the External Costs? OECD, NEA4372, Nuclear Energy Agency, 2003. https://www.oecd-nea.org/jcms/pl_13756/nuclear-electricity-generation-what-are-the-external-costs?details=true
IAEA 2006 Nuclear Power Reactors in the World, International Atomic Energy Agency (IAEA). Austria, Vienna
Balachandran G and Kapil Patil K 2012 Nuclear Power Plant and Civil Nuclear Liability , Institute for Defence Studies and Analysis, Delhi
Shah JC et al. 1977 Experience from the Construction and Operation of Tarapur and Rajasthan Nuclear Power Station" [IAEA-CN-36/360 (VII.3)], Salzburg Conference
Sundaram CV, Krishnan LV and Iyengar TS 1998 Atomic energy in India: 50 years. Department of Atomic Energy, New Delhi
Agreement for cooperation between the Government of India and the Government of United States of America concerning peaceful uses of nuclear energy (2007). http://www.meaindia.nic.in/pressrelease/2007/08/03pr01.pdf
Sarma MSR, Sah BML and Subbaratnam T 1981 Dousing incident at RAPS Unit I, Regional seminar for Asia and the Pacific Region—radiation emergency preparedness (health physics and medical aspects), Kalpakkam, India, 30 Nov 1981
Sinha RK et al 2010 Plant life management (PLIM) practices for pressurised heavy water nuclear reactors (PHWR) in understanding and mitigating ageing in nuclear power plants Materials and operational aspects of plant life management (PLIM), Edited by Philip G. Tipping, Wood Head Publishing, pp. 739–794
Grover R B and Srinivasan M R 2020 Vikram Sarabhai: his vision for the development of atomic energy in India. Curr. Sci. 118(8): 1191–1195
Bharadwaj A, Krishnan LV and Rajagopal S 2017 Nuclear viewpoint in India, MRS energy & sustainability: a review. J. Mater. Res. Soc. , 4, Article number: 6
Sharma S and Mukherjee SP 2009 A Dream Comes True- The Saga of Heavy Water Production in India , Heavy Water Board, Mumbai
Bhasin V, Kushwaha HS and Kakodkar A 2011 Failure Analysis of MAPS Inlet Manifold. In Transactions of the 11th International Conference on Structural Mechanics in Reactor Technology, Tokyo
Kakodkar A 2019 Fire and Fury Rupa publications, 2019, P49 & 53
Sundarrajan AR, Parthasarathy KS and Sinha S 2008 Atomic Energy Regulatory Board- 25 years of Safety Regulation . https://www.aerb.gov.in/images/PDF/Silver_Jubilee_Book/SJBook.pdf0
Murugan S et al . 2013 Irradiation testing of zirconium alloys and stainless steel in fast breeder test reactor, India. In Effects of Radiation on Nuclear Materials : 25th Volume, ed. T. Yamamoto, M. Sokolov, and B. Hanson (West Conshohocken, PA: ASTM International), pp. 176–191
www.npcil.co.in
https://www.iaea.org/resources/databases/power-reactor-information-system-pris
Basu P C and Gupchup V N 2004 Safety evaluation of rehabilitation of delaminated containment dome. Nucl. Eng. Des. 228: 195–205
Rajamani N 2017 Reprocessing of spent nuclear fuel in India: present challenges and future programme. Prog. Nucl. Energy 101: 118
Manoharan N, Suresh Kumar KV and Srinivasan G 2011 Fifteen years of operating experience of Kamini Reactor , IAEA
Tongia R and Arunachalam V S 1998 India’s nuclear breeders: Technology, viability and options. Curr. Sci. 75(6): 549
RaoKR2001, Radioactive waste: the problem and its management. Curr. Sci. 81(12): 25
www.nuclear-power.net
Nagarajan K et al . 2011 Development of pyrochemical reprocessing for spent metal fuels. Energy Procedia 7: 431
Jess CG 2015 History of the ORNL molten salt program. In Workshop on Molten Salt Reactor Technologies , Oak Ridge National Laboratory
Paranjpe SR 1998 Fast Breeder Reactor Development in India (unpublished)
Vijayan P K 2015 Conceptual design of Indian molten salt breeder reactor. Pramana J. Phys. 85(3): 539
Nayak AK et al . 2019 Thorium technology development in an Indian perspective. In Thorium—Energy for the Future , A. K. Nayak and B. R. Sehgal (eds.), Springer Nature
Kakodkar A et al . 2019 Nuclear Power: India’s Development Imperative, Report Vivekananda International Foundation, Delhi
Grover R B 2017 The civil liability for nuclear damage act of India: An engineering perspective regarding Supplier’s liability. Prog. Nucl. Energy 101: 168
Grover R B and Puri R R 2013 Development of human resources for Indian nuclear power programme. Sadhana 38(5): 1051–1064
Bajaj S S 2013 Regulatory practices for nuclear power plants in India. Sadhana 38(5): 1027–1050
Mishra L 1999 India's Quest for Technological Self- Reliance , PhD Thesis, Jawaharlal Nehru University, Delhi
Lok Sabha Secretariat 1994 Ninth Report Standing Committee on Energy, Department of Atomic Energy Demands for Grants (1994-95) Presented to Parliament
Download references
Author information
Authors and affiliations.
Indira Gandhi Centre for Atomic Research (Formerly), Chennai, Tamil Nadu, 603210, India
G Vaidyanathan
Indira Gandhi Centre for Atomic Research (Formerly), Pune, Maharashtra, 411038, India
You can also search for this author in PubMed Google Scholar
Corresponding author
Correspondence to G Vaidyanathan .
Rights and permissions
Reprints and permissions
About this article
Vaidyanathan, G., Kale, R.D. India’s nuclear power program: a critical review. Sādhanā 47 , 181 (2022). https://doi.org/10.1007/s12046-022-01953-9
Download citation
Received : 23 March 2021
Revised : 02 November 2021
Accepted : 13 July 2022
Published : 30 August 2022
DOI : https://doi.org/10.1007/s12046-022-01953-9
Share this article
Anyone you share the following link with will be able to read this content:
Sorry, a shareable link is not currently available for this article.
Provided by the Springer Nature SharedIt content-sharing initiative
- construction
- Find a journal
- Publish with us
- Track your research
Javascript Required!
Javascript is required for this site.
Research Reactors
(Updated June 2021)
- Many of the world's nuclear reactors are used for research and training, materials testing, or the production of radioisotopes for medicine and industry. They are basically neutron factories.
- These are much smaller than power reactors or those propelling ships, and many are on university campuses.
- There are about 220 such reactors operating, in 53 countries.
- Some operate with high-enriched uranium fuel, and international efforts have substituted high-assay low-enriched fuel in most of these. Some radioisotope production also uses high-enriched uranium as target material for neutrons, and this is being phased out in favour of low-enriched uranium.
Research reactors comprise a wide range of civil and commercial nuclear reactors which are generally not used for power generation. The term is used here to include test reactors, which are more powerful than most. The primary purpose of research reactors is to provide a neutron source for research and other purposes. Their output (neutron beams) can have different characteristics depending on use. They are small relative to power reactors whose primary function is to produce heat to make useful amounts of electricity. They are essentially net energy users. Their power is designated in megawatts (or kilowatts) thermal (MWth or MWt), but here we will use simply MW (or kW). Most range up to 100 MW, compared with 3000 MW ( i.e. 1000 MWe) for a typical power reactor. In fact the total power of the world's 250 research reactors is little over 3000 MW.
Research reactors are simpler than power reactors and operate at lower temperatures. They need far less fuel, and far less fission products build up as the fuel is used. On the other hand, their fuel requires uranium that is more highly enriched, typically up to 20% U-235, known as high-assay low-enriched uranium (HALEU), although some older ones still use 93% U-235. They also have a very high power density in the core, which requires special design features. Like power reactors, the core needs cooling, usually passively and only the higher-powered test reactors need forced cooling. Usually a moderator is required to slow down the neutrons and enhance fission. As neutron production is their main function, most research reactors also need a reflector to reduce neutron loss from the core.
Operational research reactors
Nearly all of the world’s research reactors operate with thermal (slow) neutrons; Russia claims that its BOR-60 at Dimitrovgrad is the only fast neutron research reactor.* It started up in 1969 and is to be replaced after the end of 2020 with the MBIR, with four times the irradiation capacity. There is a world shortage of fast reactor research capacity, especially for fast neutron materials testing for Generation IV reactor developments. In February 2018 a bipartisan bill passed by the US House of Representatives authorized $2 billion for the construction of a "versatile reactor-based fast neutron source, which shall operate as a national user facility" by 2026. It will be a research reactor for "development of advance reactor designs, materials and nuclear fuels" of at least 300 MWt.
* Several small experimental reactors – CEFR, FBTR, Joyo – fall into the broad category of research reactors in that they are not designed to produce power for the grid, but they do not generally operate as neutron irradiation and research facilities for third parties (although CEFR may do so to some extent).
As of June 2021 the IAEA research reactor database showed that there were 223 operational research reactors, 11 under construction, 16 planned, 27 temporarily or in extended shutdown, 58 permanently shutdown, and 511 decommissioned or undergoing decommissioning. A majority of the operational and temporary shutdown research reactors are over 40 years old.
Many research reactors are used with international collaboration, and the products of those used for isotope production are traded internationally. The IAEA has designated two international research hubs based on research reactors, giving them ICERR (International Centres based on Research Reactors) status valid for five years. The first is in France, based on CEA’s Saclay and Cadrache facilities, the second is in Russia, the Research Institute of Atomic Reactors (RIAR) at Dimitrovgrad, with six research reactors available to IAEA member states.
Types of research reactor
There is a much wider array of designs in use for research reactors than for power reactors, where 80% of the world's plants are of just two similar types. They also have different operating modes, producing energy which may be steady or pulsed.
A common design (47 units) is the pool-type reactor, where the core is a cluster of fuel elements sitting in a large pool of water. Among the fuel elements are control rods and empty channels for experimental materials. Each element comprises several (e.g. 18) curved aluminium-clad fuel plates in a vertical box. The water both moderates and cools the reactor, and graphite or beryllium is generally used for the reflector, although other materials may also be used. Apertures to access the neutron beams are set in the wall of the pool. Tank type research reactors (21 units) are similar, except that cooling is more active.
The TRIGA (Training, Research, Isotopes, General Atomics) reactor is a common pool-type design (36 units) with three generations of design commissioned since 1960. The core consists of 60-100 cylindrical fuel elements about 37 mm in diameter, 722 mm long with aluminium or steel cladding enclosing self-moderating uranium zirconium hydride fuel. Enrichment today is HALEU - under 20%. The core sits in a pool of water and generally uses graphite as a reflector. This kind of reactor can safely be pulsed to very high power levels (up to 22,000 MW) for fractions of a second. Its UZrH fuel has a very strong prompt negative temperature coefficient, and a rapid increase in power is quickly cut short by the negative reactivity effect of the fuel.
Other designs are moderated by heavy water (c. 10 units) or graphite. A few are fast reactors, which require no moderator and can use a mixture of uranium and plutonium as fuel. Homogenous type reactors have a core comprising a solution of uranium salts as a liquid, contained in a tank about 300 mm diameter. The simple design made them popular early on, but only a few are now operating, and all except two of those (20 kW) are very low power.
Research reactors have a wide range of uses, including analysis and testing of materials, and production of radioisotopes. Their capabilities are applied in many fields, within the nuclear industry as well as in fusion research, environmental science, advanced materials development, drug design and nuclear medicine.
Four high-flux research reactors are in operation: the 45 MW High Flux Reactor in Petten (Netherlands), which is nearing the end of its design life, the upgraded 85 MW High Flux Isotope Reactor at Oak Ridge National Laboratory (USA), the 20 MW Heinz Maier-Leibnitz FRM II (Germany) and the 100 MW PIK high-flux reactor at St Petersburg (Russia).
Most research reactors (over 160) are principally for research, although some may also produce radioisotopes. As expensive scientific facilities, they tend to be multi-purpose, and many have been operating for more than 30 years.
About 820 research and test reactors have been built worldwide, 307 of these in the USA and 121 in Russia.
In 2020, Russia has most operational research reactors, followed by the USA (see above table ). Many research reactors were built in the 1960s and 1970s. The peak number operating was in 1975, with 373 in 55 countries.
Neutron beams are uniquely suited to studying the structure and dynamics of materials at the atomic level. Neutron scattering is used to examine samples under different conditions such as variations in vacuum pressure, high temperature, low temperature and magnetic field, essentially under real-world conditions.
Using neutron activation analysis, it is possible to measure minute quantities of an element. Atoms in a sample are made radioactive by exposure to neutrons in a reactor. The characteristic radiation each element emits can then be detected.
Neutron activation is the only common way that a stable material can be made radioactive. It is used to produce the radioisotopes, widely used in industry and medicine, by bombarding particular elements with neutrons so that the target nucleus has a neutron added. For example, yttrium-90 microspheres to treat liver cancer are produced by bombarding yttrium-89 with neutrons.
Neutron activation can result in fission. The most widely used isotope in nuclear medicine is technetium-99m, a decay product of molybdenum-99*. This is usually produced by irradiating a target of uranium foil with neutrons (for a week or so) and then separating the molybdenum-99 from the other fission products of U-235 in a hot cell – the Mo-99 being about 6% of the fission products. Most Mo-99/Tc-99m production has been using HEU targets, but increasingly LEU is favoured and HEU is being phased out. (Mo-99 may also be produced in power reactors by neutron activation/capture in Mo-98 targets.)
* Technetium generators, a lead pot enclosing a glass tube containing the radioisotope, are supplied to hospitals from the nuclear reactor where the isotopes are made. They contain molybdenum-99, with a half-life of 66 hours, which progressively decays to technetium-99m, with a half-life of 6 hours. The Tc-99 is washed out of the lead pot by saline solution when it is required. It is then attached to a particular protein for administering to the patient. After two weeks or less the generator is returned for recharging, since it loses 22% of its product every 24 hours.
Research reactors can also be used for industrial processing. Neutron transmutation doping (NTD) changes the properties of silicon, making it highly conductive of electricity. Large, single crystals of silicon shaped into ingots, are irradiated inside a reactor reflector vessel. Here the neutrons change one atom of silicon in every billion to phosphorus. The irradiated silicon is sliced into chips and used for a wide variety of advanced computer applications. NTD increases the efficiency of the silicon in conducting electricity, an essential characteristic for the electronics industry.
In materials testing reactors (MTRs), materials are also subject to intense neutron irradiation to study changes. For instance, some steels become brittle, and alloys which resist embrittlement must be used in nuclear reactors. The international project to build the 100 MWt Jules Horowitz reactor at Cadrache in France will enable research on materials which will be vital in Generation IV nuclear plants. It is designed to produce very high neutron flux – about twice that of France’s Osiris MTR. Civil works were more than 80% complete at the end of 2014 and test loops are being fitted out. It is due to be operational in 2021. At present Belgium’s BR2 is the largest MTR in Europe.
A very small US reactor is designed to perform research and development on various operational features of microreactors to improve their integration with end-user applications. The Department of Energy plans to build the Microreactor Applications Research Validation and Evaluation (MARVEL) reactor of 100 kWt at Idaho National Laboratory’s Transient Reactor Test Facility (TREAT). It will be based on the 1965 SNAP-10A – the only US fission reactor to have been launched into space. Fuel will be TRIGA HALEU UZrH, cooling will be by sodium or salt for operating temperature of 500-550°C. Power conversion will be by Stirling engines. This will be the first US small-scale reactor for such R&D purposes in 40 years. The DOE Microreactor Program is focused on very small, factory fabricated, transportable reactors to provide power and heat for decentralized generation in civilian, industrial and defence energy sectors.
Like power reactors, research reactors are covered by IAEA safety inspections and safeguards, because of their potential for making nuclear weapons. India's 1974 explosion was the result of plutonium production in a large, but internationally unsupervised, research reactor which closed at the end of 2010.
One of the more interesting and powerful test reactors was Plum Brook in Ohio, USA, which operated for NASA over 1961-73 and was designed to research nuclear power for aircraft, then nuclear-powered rockets and spacecraft. It was 60 MW pool-type, light water cooled and moderated, with a very high neutron flux – 420 trillion/cm 2 /s.
See also paper on Australian Research Reactors .
Research reactor fuel is more highly enriched (typically about 20% today) than power reactor fuel. It is high-assay low-enriched uranium (HALEU), which means it has less U-238, hence the used fuel has fewer actinides and less heat from radioactive decay. The proportion of fission products is not much different from used power reactor fuel.
Fuel assemblies are typically plates or cylinders of uranium-aluminium alloy (U-Al) clad with pure aluminium. They are different from the ceramic UO 2 pellets enclosed in Zircaloy cladding used in power reactors. Only a few kilograms of uranium is needed to fuel a research reactor, albeit more highly enriched, compared with perhaps a hundred tonnes in a power reactor. Research reactors typically operate at low temperatures (coolant below 100ºC), but the operating conditions are severe in other ways. While power reactor fuel operates at power density of about 5 kW/cc, a research reactor fuel may be at 17 kW/cc in the fuel meat. Also burnup is very much higher, so the fuel must withstand structural damage from fission and accommodate more fission products.
Five Russian-designed research reactors in Russia use high-enriched uranyl sulfate liquid fuel. One in Uzbekistan was decommissioned in 2014 and the fuel airlifted to Mayak.
Highly-enriched uranium (HEU – >20% U-235) allowed more compact cores, with high neutron fluxes and also longer times between refuelling. Therefore many reactors up to the late 1970s used it, and most state-of-the-art reactors had 93% enriched fuel. A total of 171 were built with a HEU core, and by 2020, 71 of these had been converted to use LEU and 28 had been shut down. The IAEA said "work remains to be done" on 72 still using HEU.
Since the early 1970s security concerns have grown, especially since many research reactors are located at universities and other civilian locations with much lower security than military weapons establishments where much larger quantities of HEU exist. Since 1978 only one reactor, the FRM-II at Garching in Germany, has been built with HEU fuel, while more than 20 have been commissioned on LEU fuel in 16 countries. The Jules Horowitz reactor in France will start up on uranium silicide fuel enriched to 27%, since the planned high-density U-Mo fuel will not be ready in time for it.)
The question of enrichment was a major focus of the UN-sponsored International Nuclear Fuel Cycle Evaluation in 1980. It concluded that to guard against weapons proliferation from the HEU fuels then commonly used in research reactors, enrichment should be reduced to no more than 20% U-235, i.e. HALEU. This followed a similar initiative by the USA in 1978 when its programme for Reduced Enrichment for Research and Test Reactors (RERTR) was launched.
Most research reactors using HEU fuel were supplied by the USA and Russia, hence efforts to deal with the problem are largely their initiative. The RERTR programme concentrates on reactors over 1 MW which have significant fuel requirements. However, some are defence-related (mostly in Russia) or impractical for other reasons. Some have lifetime cores which require no refuelling, so there is little incentive to convert them. In February 2020 the IAEA announced that almost 3500 kg of HEU fuel had been removed from research reactor sites around the world.
In 2004 the US National Nuclear Security Administration (NNSA) set up the Global Threat Reduction Initiative (GTRI), which is congruent with RERTR objectives though it is mainly tackling the disposition of HEU fuel (fresh and used) and other radiological materials. RERTR is now a major part of GTRI. GTRI claims accelerated removal of Russian-origin fresh and used HEU fuel to Russia and of US-origin fuel to the USA.
In particular, to January 2010, 915 kg of fresh and used HEU fuel had been returned to Russia from at least 11 countries including Hungary (155 kg), Serbia, Romania, Libya, Uzbekistan, Poland, Czech Republic, Latvia and Vietnam. In 2016, the last of 700 kg of HEU fuel from Poland joined them after Poland’s 30 MWt Maria reactor was fully converted to HALEU in 2014. And to January 2010, 1240 kg of US-origin HEU fuel had been returned from Europe, Israel, Turkey, Latin America, Japan and Southeast Asia. Since then more has come from some of these countries and from Belgium, Italy, Chile, Mexico, Ukraine, South Africa and Austria. In mid-2016 several hundred kilograms more was returned from Japan’s Fast Critical Assembly, along with some plutonium. The HEU returned to the USA is downblended, with the plutonium disposed of at the Waste Isolation Pilot Plant (WIPP) in New Mexico. In 2011, 33kg of HEU in Kazakhstan was downblended to LEU there and returned to the Institute of Nuclear Physics for use once the WWR-K reactor was converted to use it. Over 2015-19 more than 200 kg of HEU from two research reactors at Canada's Chalk River, Ontario, was moved to Savannah River, South Carolina.
After a hiatus of six years the US government late in 2008 had converted five university research reactors from using high- to low-enriched uranium fuel.* It was reported in 2006 that worldwide, 40 remained to be converted under the RERTR scheme using currently-available fuels, and 19 more await development of high-density fuel. At the end of 2017 these included the Advanced Test Reactor and the Advanced Test Reactor Critical Assembly, both at Idaho National Laboratory; the High Flux Isotope Reactor at Oak Ridge National Laboratory, Tennessee; the Massachusetts Institute of Technology Reactor (MITR) in Cambridge, Massachusetts; the National Bureau of Standards Reactor in Gaithersburg, Maryland; and the University of Missouri Research Reactor (MURR) in Columbia, Missouri.
* Texas A&M, University of Florida, Purdue, Oregon State and Washington State University reactors can now operate on fuel of less than 20% enrichment, and the University of Wisconsin reactor was to be converted in 2009.
China converted the first of its miniature neutron source reactors (MNSRs) to a denser LEU fuel in 2016, in partnership with the US NNSA and Argonne National Laboratory. Other MNSRs are in China, Ghana, Nigeria, Iran, Pakistan and Syria. The MNSR core has about one kilogram of of 90% enriched fuel. HEU from Ghana and Nigeria at least has been returned to the China Institute of Atomic Energy.
By December 2018 NNSA’s Material Management and Minimization (M3) Reactor Conversion Program had converted or verified shutdown of more than 90 HEU-fuelled research and test reactors worldwide over the past 30 years, and had confirmed the disposition of more than 6.7 tonnes of HEU and plutonium from 33 countries.
New LEU fuels
These RERTR programmes have led to the development and qualification of new, high density, high-assay low enriched uranium (HALEU) fuels. The original fuel density was about 1.3-1.7 g/cm 3 uranium. Lowering the enrichment meant that the density had to be increased. Initially this was to 2.3-3.2 g/cm 3 with existing U-Al fuel types.
To September 2009, 67 research reactors (17 in USA) had been converted to low-enriched uranium silicide fuel or shut down, including major reactors in Ukraine, Uzbekistan and South Africa. Another 34 are convertible using present fuels. A further 28, mostly Russian designs but including two US university reactors, need higher-density fuels not yet available. The goal was to convert or shut 129 reactors by 2018. US exports of HEU declined from 700 kg/yr in mid 1970s to almost zero by 1993.
The Soviet Union made similar efforts from 1978, and produced fuel of 2.5 g/cm3 with enrichment reduced from 90 to 36%. It largely stopped exports of 90% enriched fuel in the 1980s. No Russian research reactor has yet been converted to LEU, and the Russian effort has been focused on its reactors in other countries. However, Russia has been looking at the feasibility of converting six domestic reactors,* while others will require high-density fuels. Early in 2012 a joint Rosatom-US NNSA project completed studies on converting two of these six reactors to HALEU fuel. Another 68 Russian reactors fall outside the scope of the conversion program because they are defence-related or special purpose. A December 2010 agreement with the US DOE relates to feasibility studies on converting six Russian research reactors to HALEU.
* IR-8, OR, and Argus at Kurchatov Institute, IRT-MEPHI at Moscow Engineering Physics Inst, IRT-T at Tomsk Polytechnic Inst, MIR at Dimitrovgrad Research Inst.
The first generation of new HALEU fuels used uranium and silicon (U 3 Si 2 -Al – uranium silicide dispersed in aluminium) – at 4.8 g/cm 3 . There have been successful tests with denser U 3 Si-Al fuel plates up to 6.1 g/cm 3 , but US development of these silicide fuels ceased in 1989 and did not recommence until 1996. In Russia the Bochvar Institute is developing fabrication technology for uranium disilicide pellets as part of developing accident-tolerant fuels for power reactors. As well as high uranium density, it points to high thermal conductivity and low heat capacity of silicide fuel. The presence of silicon makes reprocessing more difficult.
An international effort is underway to develop, qualify and license a high-density fuel based on U-Mo alloy dispersed in aluminium, with a density of 6-8g/cm 3 . The principal organizations involved are the US RERTR program at the Idaho National laboratory (INL) since 1996, the French U-Mo Group (CEA, CERCA, COGEMA, Framatome-ANP and Technicatome) since 1999 and the Argentine Atomic Energy Commission (CNEA) since 2000. This development work was undertaken to provide fuels which can extend the use of LEU to those reactors requiring higher densities than available in silicide dispersions and to provide a fuel that can be more easily reprocessed than the silicide type. Approval of this fuel was expected in 2006 but tests since 2003 failed to confirm performance due to unstable swelling under high irradiation. Attention has turned to monolithic U-Mo fuel.
In 2012, Belgium, France, South Korea and the USA agreed to cooperate in the development of high-density HALEU fuel production technology using centrifugal atomization technology developed by the Korea Atomic Energy Research Institute (KAERI). The USA provided 110 kg of HALEU in June 2013 for KAERI to manufacture 100 kg of atomized U-Mo powder. In January 2014, the powder was shipped to France for fabrication into fuel elements by Areva's research reactor fuel manufacturer CERCA. Testing of this monolithiic HALEU-Mo fuel began in the Advanced Test Reactor at Idaho National Laboratory (INL) in October 2015, and in April 2017 KAERI announced the successful completion of those verification tests.
This monolithic HALEU-Mo fuel is essentially pure metal with 10% Mo, instead of a dispersion of U-Mo in aluminium. The uranium density is 15.6 g/cm 3 and this would enable every research reactor in the world to convert from HEU to HALEU fuel without loss of performance. In December 2017 the NNSA presented a preliminary report of HALEU-Mo monolithic fuel to the Nuclear Regulatory Commission as a first step in qualifying it, and being able to convert the six remaining US high-performance research reactors from HEU fuel. In February 2020 NNSA awarded a contract to BWX Technologies to prepare for HALEU-Mo fuel production at Lynchburg, Virginia.
KAERI said the results from the testing of the fuel will be used to obtain a construction licence for a new research reactor planned in Busan, which it hopes will be the first application for this HALEU-Mo alloy fuel.
In Russia, a parallel Russian RERTR programme funded jointly by Rosatom and the US RERTR programme has been working since 1999 to develop U-Mo dispersion fuel with a density of 2-6 g/cm 3 for use in Russian-designed research and test reactors. However, this has not fulfilled expectations.
All solid fuel is aluminium-clad.
Used fuel from research reactors usually generates less than 2kW/m 3 of decay heat, so is classed as intermediate-level waste (ILW), though the activity may still be quite high.
U-Al fuels can be reprocessed by Areva in France, and U-Mo fuels may also be reprocessed there. U-Si and TRIGA fuels are not readily reprocessed in conventional facilities. However, at least one commercial operator has confirmed that U-Si fuels may be reprocessed in existing plants if diluted with appropriate quantities of other fuels, such as U-Al.
To answer concerns about interim storage of spent research fuel around the world, the USA launched a program to take back US-origin spent fuel for disposal and nearly half a tonne of U-235 from such HEU fuel has been returned. By the time the program was to end with fuel discharged in 2006, U-Mo fuel was expected to be available. Due to the slippage in target date, the US take-back program has now been extended by ten years.
Disposal of high-enriched or even 20% enriched fuel needs to address problems of criticality and requires the use of neutron absorbers or diluting or spreading it out in some way.
In Russia, a parallel trilateral program involving IAEA and the USA to move 2 tonnes of HEU and 2.5 tonnes of LEU spent fuel to the Mayak reprocessing complex near Chelyabinsk over the ten years to 2012. This Russian Research Reactor Fuel Return Program (RRR FRT) envisaged 38 shipments (of both fresh and used fuel) from ten countries over 2005-08, then 8+ shipments from six countries to remove all HEU fuel discharged before reactors converted to HALEU or shut down. Seventeen countries have Soviet-supplied research reactors, and there are 25 such reactors outside Russia, 15 of them still operational. Since Libya joined the program in 2004, only North Korea objects to it.
The 2004 joint US-Russian program to retrieve used fuel from 14 countries (Belarus, Bulgaria, Hungary, Vietnam, Germany, Kazakhstan, Latvia, Libya, Poland, Romania, Serbia, Uzbekistan, Ukraine and the Czech Republic) has been extended from 2016 to 2024.
Aqueous homogeneous reactors
Aqueous homogeneous reactors (AHRs) have the fuel mixed with the moderator as a liquid. Typically, low-enriched uranium nitrate is in aqueous solution. About 30 AHRs have been built as research reactors and have the advantage of being self-regulating and having the fission products continuously removed from the circulating fuel. However, corrosion problems and the propensity of water to decompose radiolytically (due to fission fragments) releasing gas bubbles have been design problems.
A series of three reactors were built at Los Alamos National Laboratory in the mid-19402/early 1950s. The first AHR at Oak Ridge National Laboratory went critical in 1952, and attained full power of one megawatt in 1953. A second one there reached 5 MW in 1958. Plans for a 70 to 150 MWe commercial unit did not proceed. A 1 MWt AHR operated in the Netherlands 1974-77 using Th-HEU MOX fuel. At Russia's Kurchatov Institute the 20 kW ARGUS AHR has operated since 1981, and R&D on producing Sr-89 and Mo-99 from it is ongoing. The Mo-99 is extremely pure, making the design potentially valuable for its commercial production. As of 2006, only five AHRs were operating, but the concept of extracting medical isotopes directly from the fuel has sparked renewed interest in them. The USA, China and Russia are assessing the prospects of using AHRs for commercial radioisotope production.
In 2008, the IAEA summarized: "The use of solution reactors for the production of medical isotopes is potentially advantageous because of their low cost, small critical mass, inherent passive safety, and simplified fuel handling, processing and purification characteristics. These advantages stem partly from the fluid nature of the fuel and partly from the homogeneous mixture of the fuel and moderator in that an aqueous homogeneous reactor combines the attributes of liquid fuel homogeneous reactors with those of water moderated heterogeneous reactors. If practical methods for handling a radioactive aqueous fuel system are implemented, the inherent simplicity of this type of reactor should result in considerable economic gains in the production of medical isotopes." Thermal power can be 50-300 MW at low temperature and pressure, and low enriched uranium fuel used. However, recovering desired isotopes on a continuous production basis remains to be demonstrated. As well as those in solution, a number of volatile radioisotopes used in nuclear medicine can be recovered from the off-gas arising from radiolytic 'boiling'. For isotopes such a Sr-89 this is very much more efficient than alternative production methods.
At the end of 2007, Babcock & Wilcox (B&W) notified the US Nuclear Regulatory Commission that it intended to apply for a licence to construct and operate a Medical Isotope Production System (MIPS) – an AHR system with low-enriched uranium in small 100-200 kW units for Mo-99 production. A single production facility could have four such reactors. B&W expects a five-year lead time to first production. The fuel is brought to criticality in a 200-litre vessel. As fission proceeds, the solution is circulated through an extraction facility to remove the Mo-99 and then back into the reactor vessel, which is at low temperature and pressure. In January 2009, B&W Technical Services Group signed an agreement with radiopharmaceutical and medical device supplier Covidien to develop technology for the MIPS. In October 2012 Covidien pulled out of the joint venture with B&W “after learning that the time and cost involved with the project would be greater than originally expected.” B&W appears to have dropped the MIPS.
Research reactors originally with high-enriched uranium (HEU) fuel
Data from IAEA: Nuclear Research Reactors in the World, 2000, plus Nigeria. NB some now are converted to LEU or closed. MNSR = miniature neutron source reactor, Chinese copy of Slowpoke. crit fast = very low power critical assembly for fast neutrons.
Notes & References
General sources.
IAEA, Research Reactors database IAEA, Nuclear Research Reactors in the World, reference data series #3, Sept 2000 Research Reactors: an overview, by Colin West, ANS Nuclear News, Oct 1997 IAEA, Research Reactor Facility Characteristics, 1985 Research reactors under threat, by W.Krull, Nucl.Eng.Intl. Oct 2000 O.Bukharin, 2002, Making fuel less tempting, Bull. Atomic Scientists, July-Aug 2002 Travelli, A 2002, Progress of the RERTR program in 2001 Reduced Enrichment for Research and Test Reactors (RERTR) Program website Travelli, A 2002, Status and Progress of the RERTR Program in the Year 2002, RERTR conference November 2002 Snelgrove JL 2003, Qualification and Licensing of U-Mo Fuel, RRFM conference, March 2003 NuclearFuel 17/3/03, 22/11/04, 26/3/07, 20/10/08 Wachs, Daniel, 2010, Reactor Conversion, Nuclear Engineering International January 2010 National Nuclear Security Administration website Mark D. Bowles and Robert S. Arrighi, NASA's Nuclear Frontier – The Plum Brook Reactor Facility, 1941-2002, Monographs in Aerospace History Series No. 33, SP-2004-4533, NASA History Division, August 2004 Homogeneous Aqueous Solution Nuclear Reactors for the Production of Mo-99 and other Short Lived Radioisotopes, International Atomic Energy Agency, IAEA-TECDOC-1601, ISBN 9789201097088 (September 2008) B&W and Covidien to Develop U.S. Source of Key Medical Isotope (26 Jan 2009) National Nuclear Security Administration, NNSA reaches milestone in developing new nuclear fuel for U.S. high-performance research reactors (20 December 2017)
Related information
Radioisotopes in industry, radioisotopes in medicine, the many uses of nuclear technology, you may also be interested in.

South Africa


An official website of the United States government
The .gov means it’s official. Federal government websites often end in .gov or .mil. Before sharing sensitive information, make sure you’re on a federal government site.
The site is secure. The https:// ensures that you are connecting to the official website and that any information you provide is encrypted and transmitted securely.
- Publications
- Account settings
Preview improvements coming to the PMC website in October 2024. Learn More or Try it out now .
- Advanced Search
- Journal List
- Proc Natl Acad Sci U S A
- v.116(36); 2019 Sep 3
Nuclear safety in the unexpected second nuclear era
a Key Laboratory of Neutronics and Radiation Safety, Institute of Nuclear Energy Safety Technology, Chinese Academy of Sciences, Hefei, 230031 Anhui, China
Zhibin Chen
Shanqi chen, daochuan ge, jiangtao jia.
Author contributions: Y.W. designed research; Y.W., Z.C., Z.W., S.C., D.G., C.C., J.J., Y.L., M.J., T.Z., F.W., and L.H. performed research; Z.C., Z.W., S.C., D.G., C.C., J.J., Y.L., M.J., T.Z., F.W., and L.H. analyzed data; and Z.C., Z.W., S.C., D.G., and C.C. wrote the paper.
Significance
Despite great efforts to pursue a safe nuclear energy system during the first nuclear era, which was dominated by developed countries, severe nuclear accidents still occurred. Today, nuclear energy development has entered an unexpected second nuclear era, which is driven by developing countries. This may give rise to a great risk. Nuclear power plants are complex sociotechnical systems, and their safety has never been fully defined. We argue that social aspects, rather than just technical measures, must be involved to ensure nuclear safety. In this paper, the nature of nuclear safety is elucidated with identification of new challenges, and corresponding suggestions are proposed to improve nuclear safety in the unexpected second nuclear era.
Nuclear energy development has entered an unexpected second nuclear era, which is mainly driven by developing countries. Despite major efforts to pursue a safe nuclear energy system in the first nuclear era, severe nuclear accidents occurred. A basic problem is that we do not have an adequate understanding of nuclear safety. From the viewpoints of risk and the close coupling of technical and social factors, this paper reexamines the nature of nuclear safety and reviews how previous experts understood it. We also highlight the new challenges that we are likely to confront in the unexpected second nuclear era and clarify some of the refinements that need to be made to the concept of nuclear safety from a sociotechnical perspective. These include the following: 1) Risk decisions should be made based on integrating social and technical elements (i.e., “social rationality”); 2) risk needs to be controlled based on the “Wuli–Shili–Renli” framework; 3) systems thinking should be substituted for reductionism in risk assessment, and social mechanisms need to be combined to address uncertainties; and 4) public-centered risk communication should be established. This contribution can provide a theoretical foundation for improving our understanding of the nature of nuclear safety and for transforming the concept of nuclear safety in the unexpected second nuclear era.
Since the 1950s, the exploitation and utilization of nuclear energy has had powerful effects on the development of human society and has greatly improved people’s ability to understand and utilize the laws of nature. However, following decades of development, investment in nuclear power has begun to stagnate in many developed countries. In response to the Fukushima nuclear accident, some countries, such as Germany, Switzerland, and Belgium, have even decided to phase out nuclear power within the next 20 y. The share of global electricity contributed by nuclear power has fallen from 16 to 17% in the mid-1980s to ∼10% in 2018 ( 1 ). Meanwhile, the high cost of nuclear power and the public’s doubts about its safety have led to dim prospects for the future development of nuclear energy, at least in much of the most industrialized parts of the world. According to a new International Atomic Energy Agency (IAEA) forecast of nuclear power development trends by 2050, nuclear power growth in developed regions such as Europe and North America is expected to be nearly zero, if not negative ( 2 ). Therefore, the second nuclear era (generally referred to the “nuclear energy renaissance”) first proposed by Alvin M. Weinberg ( 3 , 4 ), which was highly desired after the Three Mile Island (TMI) nuclear accident, has not yet appeared during the past 40 y, and today’s reality is far from what Weinberg imagined.
Nuclear power construction in developed and developing countries has actually undergone a major reversal. Of the 55 nuclear power plants (NPPs) currently under construction, 47 are in developing countries ( 5 ). In addition, ∼28 countries without NPPs are planning or trying to launch nuclear power projects ( 6 ). Based on actual development trends in nuclear energy, we have redivided the eras of civilian nuclear energy as shown in Fig. 1 , taking the Chernobyl nuclear accident as the approximate watershed. Our division is different from the concept of “the first and second nuclear eras” proposed by Weinberg in the 1980s ( 7 , 8 ). In our definition, the first nuclear era, from the mid-1950s to the mid-1980s, was mainly led by developed countries (e.g., the United States, France, Japan, Germany, and the United Kingdom), where more than four times as many NPPs were built than in developing countries (e.g., the former Soviet Union and Korea). The development of NPPs in this era began with a short-term exploration, followed by a large-scale expansion. Primary drivers included nuclear weapons considerations ( 9 ), energy security ( 10 , 11 ), and market factors ( 12 ), complemented by environment factors ( 13 ). Since the mid-1980s, the main force driving the development of nuclear power shifted to developing countries, and we call this“the unexpected second nuclear era.” For large developing countries such as China and India, climate change and environmental pollution have become the main considerations for the development of nuclear power ( 11 ). For most of the newcomer countries enhancing energy independence and international influence through nuclear power is one of their important motivations ( 9 ), and concern about greenhouse gas emissions does not have a high priority in these countries because neither the Kyoto Protocol nor any other international agreement constrains their emissions. By contrast, developed countries are building few new reactors and focused on preserving existing plants and preparing for a possible bow wave of decommissioning at midcentury ( 14 ).

Nuclear reactor construction starts and total operational reactors as a function of time ( https:/pris.iaea.org/pris/ ). Data from the International Atomic Energy Agency.
Compared with the first nuclear era, this unexpected second nuclear era exhibits some new realities. First is the impact of new suppliers on international nuclear safety governance. Nuclear suppliers from developing countries such as China, Korea, and India are entering market competition, while traditional leading suppliers (e.g., US-based Westinghouse and France’s AREVA) decline. The emerging suppliers do not have a good record of recommending major improvements to the global nuclear safety governance system and are reluctant to take leadership in initiating improvements in the nuclear safety governance system. There are also concerns about the effective implementation of the existing nuclear safety governance system into these suppliers and some suppliers do not even participate in the international initiatives. Moreover, questions are also raised about whether the emerging suppliers will comply with international standards, and how that will affect importers and the global nuclear safety governance system ( 14 ). It is also not clear that the emerging suppliers will have the capacity to involve their regulators in helping recipient countries or will impose their domestic standards as a condition of supply. Second are challenges to domestic nuclear safety governance in nuclear newcomers. The construction of nuclear power is expanding into countries that previously lacked NPPs. This is especially the case in African and Asia–Pacific regions which lead in the new development of nuclear energy. These countries have relatively poor infrastructures, weaker rule of law and safety culture, less regulatory independence, lower scores on assessments of corruption resistance, and decreased nuclear technical and training depth ( 14 , 15 ). Some regions are also stability-challenged, such as the Middle East. These factors give rise to a great deal of uncertainty with respect to nuclear safety. Third are new risks associated with technological evolution. Nuclear safety governance faces various threats different from those of the previous era, which are induced by technological evolutions: Cyber security issues are raised by extensive applications of digitalized instrument and control systems ( 16 ), escalating into plant safety threats by inducing wrong operator actions, and advanced reactors favored by newcomers, which are smaller and expected to be more widely distributed than existing NPPs, may place an additional strain on the existing governance system [e.g., terrorist threats on floating small modular reactors ( 17 )]. In addition, many older nuclear reactors are reaching their design lifetimes, with nearly 100 reactors operated for 40 y or more. Lifetime extensions or decommissioning of many old reactors would pose safety issues like decreased safety margin and radioactive wastes.
The growth of nuclear energy in developing countries in recent years has sparked a widespread discussion ( 18 – 20 ). Although nuclear energy is considered to be important for meeting energy demands and fighting climate change, the spread of nuclear power in developing countries is also accompanied by great risks, which have already presented challenges in nations with well-developed nuclear infrastructure, as seen in the Fukushima nuclear accident in Japan. NPPs are complex sociotechnical systems that face threats to safety caused by system complexity, personnel unreliability, and technical limitations. Plant safety depends on comprehensive risk management, including advanced technology research and development, operations management, and government supervision. However, the industrial level in developing countries is currently much lower than that of developed countries. In addition, as exemplified by the recent vaccine scandal in China and food safety scandal in India, developing countries’ laws and regulations, talent pools, and supervision and emergency response mechanisms are not yet sound. Even worse, nuclear power is not a publicly accepted choice in some developing countries; instead, it is merely wishful thinking of governments hoping to increase their countries’ international prestige. This situation could lead to protests similar to the Indonesian public’s antinuclear parade. Hence, all these factors inevitably increase worry about nuclear safety in the unexpected second nuclear era.
Despite great efforts to improve nuclear safety and the development of a series of safety theories, methods, and measures proposed in the first nuclear era, severe nuclear accidents have occurred. Lessons learned from the nuclear disasters are generally divided into two categories: those that blame technical factors (such as reactor design defects and inadequate risk assessment models) and those that blame social factors (such as human/organizational errors and poor regulations). Social factors have drawn more and more attention ( 21 ) in the unexpected second nuclear era, owing to the fact that technical factors are not dominant with the continuous development of NPP technologies and the accumulation of operating experience. In fact, the social and technical factors cannot be treated separately, because NPPs are complex sociotechnical systems, and we actually have no adequate comprehensive understanding of nuclear safety. In this paper, we have reviewed the history of nuclear safety research and rethought the nature of nuclear safety. We propose that technical and social factors should be closely linked to address the nuclear risk. This contribution provides a theoretical foundation upon which to continuously improve nuclear safety in the unexpected second nuclear era.
The Nature of Nuclear Safety
Nuclear safety research started with the Fermi reactor, where multiple redundant safety systems played important roles in keeping the whole operation under control. However, in the unexpected second nuclear era, the concept of nuclear safety has gone far beyond technology, as nuclear safety has been recognized as a prevalent social issue more than a technical issue ( 22 ). According to the fundamental safety principles in the safety standards of the IAEA ( 23 ), nuclear safety entails “the protection of people and the environment against radiation risks, and the safety of facilities and activities that give rise to radiation risks.” This definition explains nuclear safety through “safety” and “risk” but does not clarify the nature of nuclear safety. Although it addresses the goals and radiation-related aspects of nuclear safety, it does not touch on nuclear safety beyond radiation (i.e., the close coupling of technical factors and social factors as well as their comprehensive impacts on safety).
Before investigating the nature of nuclear safety, we need to understand what safety is. However, safety is a multidisciplinary concept, and there is no consensus on its definition despite the large number of studies on the subject. Safety is defined as a type of status, ability, process, condition, and so on. We find that regardless of how safety is defined, its interpretation inevitably involves risk. According to ISO 31000, risk is the “impact/effect of uncertainty on objectives” ( 24 ), whose definition based on uncertainty is adopted in this paper. The objectives here refer to something that humans value (including humans themselves, environment, money, etc.) involving physical and mental aspects. Thus, the nature of safety can be understood as the ability to cope with uncertainties and their adverse impacts/effects on humans both physically and psychologically.
The uncertainties in nuclear safety come from the social and technical aspects of the system and their interrelatedness. Compared with systems in other industries, the features of nuclear energy systems are embodied in the principles of nuclear fission reactions. A fission chain reaction is the prerequisite for nuclear power, but it also creates the potential instability of nuclear power. First, there is a likelihood of prompt supercriticality that can lead to drastic power increasing within a very short time, which may ultimately result in severe core damage and even collapse. Second, decay heat is still generated after shutdown ( 25 ) and may cause core meltdown if not removed effectively. Third, many radioactive fission products, including fission fragments and their decay products, are produced, some of which have very long half-lives. Once these fission products are released into the environment in severe accidents, they can pose a great threat to human life and health. For example, the TMI nuclear accident was caused by the failure of technical components compounded by operators’ incorrect judgment. In the Chernobyl nuclear disaster, a combination of reactor design flaws and operation contrary to the checklist of safety tests eventually resulted in the large release of radioactive materials into the environment.
An accident induced by uncertainties in the nuclear energy system may be a serious threat to humans and the environment, and these uncertainties cannot be fully eliminated by technical approaches. Thus, social mechanisms should be used to cope with uncertainties. Nuclear accidents may bring about multiple special impacts compared with accidents in other industries. First, there will be health effects from radiation (fatalities, cancers, hereditary effects, etc.). Second, radioactivity, which is invisible and untouchable, leads to extensive psychological fear. Third, the impact is large and lasts for a long time after a single accident ( 26 – 28 ). For instance, in the Fukushima nuclear accident, there were no prompt fatalities, and no discernible cancer effect was expected to occur. However, people experienced lasting psychological trauma, and there were major impacts on the environment, economy, and politics. The cleanup remains difficult, and the recovery costs are huge even after the accident.
In summary, multiple social and technical measures, including advanced design concepts, operations management, safety regulations, and safety culture, should be integrated to address the uncertainties of nuclear energy systems and to control their risks. Meanwhile, different methods, including probabilistic risk assessment (PRA), should be applied to evaluate the potential physical and psychological hazards. In addition, it is worth pointing out that technical and social elements are closely coupled in nuclear safety. Technical aspects, such as risk models and safety principles, have been embedded in social value and practice. Meanwhile, the social aspects (e.g., safety culture, safety regulation, and public acceptance) have also been reflected in the operation of NPPs. Nuclear power cannot successfully develop without risk communication, and decision making for acceptable risk should also be performed with sufficient public participation to improve public acceptance of nuclear energy. As shown in Fig. 2 , social mechanisms and technical approaches should be synthesized to cope with the uncertainties resulting from technical and social elements and their interaction in the system.

Nuclear safety based on the close coupling of society and technologies.
Social Rationality-Based Risk Decision Making
A fundamental question in managing hazardous technologies is, “how safe is safe enough?” This is a catchy phrase used to identify the acceptable risk of a certain activity or product ( 29 ). To answer this question, in the early days, minimum requirements, including a series of rules and guides based on defense in depth (DiD), as low as reasonably achievable, and safety margin principles, were established for how NPPs should be designed, built, and operated, but without specifying the safety level that they were hoping to achieve. This question was not addressed directly until safety goals were adopted in the nuclear industry ( 30 ).
The Evolution of Acceptable Risk.
Two academic papers brought the acceptable risk of NPPs to the forefront of nuclear engineering in the late 1960s. The first one was published in 1967 by F. R. Farmer, entitled “Reactor safety and siting: A proposed risk criterion,” in which he first linked the acceptable accident frequency to the release of radioactive materials to form a set of quantitative safety criteria ( 31 ). The second paper was published in 1969 by C. Starr in Science and was entitled “Social benefit versus technological risk,” in which he offered an approach to establish the “acceptable risk” for NPPs based on historical data and pointed out that “the public is willing to accept ‘voluntary’ risk roughly 1000 times greater than ‘involuntary’ risk” ( 32 ). By 1975, the application of PRA in the Reactor Safety Study (WASH-1400) made it possible to set quantitative safety goals. However, the regulatory authority did not take the concept and value of quantitative safety goals seriously until the TMI nuclear accident in 1979.
During the investigation of the TMI accident, the US nuclear community, including the Nuclear Regulatory Commission (NRC), began to recognize the necessity of safety goals; then, the two “0.1%” quantitative health objectives (QHOs) were proposed by the NRC after years of work. That is, for an individual near a NPP (within 1 mile), prompt fatality risk should not exceed 0.1% of the sum resulting from other accidents, and for the population near the site (within 10 miles), cancer fatality risk should not exceed 0.1% of the sum resulting from other causes. The probabilistic safety criteria and safety goals at the technical level were first developed by the United States to substitute for QHOs in practical use, which generally refer to the frequency of core damage (CDF) and the release frequency of large amounts of radioactive materials (LRF/LERF). The probabilistic safety criteria have been widely recognized and applied in nuclear safety regulation around the world. There are three categories regarding the status of probabilistic safety goals ( 33 ): 1) a legally strict value to be fulfilled, 2) a strict value that is not legally binding, and 3) a target value used as one piece of information in the risk-informed regulation. However, practically, there is a consensus for new plants, where not meeting the probabilistic risk criteria would prevent the regulatory body from granting an operating license. Analysis of the reasons for exceeding the target values will be required to identify the cause, and compensatory actions must be taken to correct the cause. Therefore, probabilistic safety goals (especially CDF) have in fact become regulatory limits. Meanwhile, to improve safety, the criteria for new NPPs are generally 1 order of magnitude higher than those for existing NPPs ( Table 1 ). For some countries such as France, probabilistic safety goals are not espoused considering that these could lead to a low motivation for supplementary safety improvements, even if an improvement could be carried out at a low cost ( 34 ). However, the Fukushima nuclear accident reminded us to reexamine the rationality of our current safety goals. In terms of radiation health effects, there were no prompt fatalities, and no discernible cancer effect is expected to occur owing to the timely evacuation of the public. Thus, the Fukushima power plant still meets the two “0.1%” safety goals, leading to the conclusion that its safety level should be acceptable even considering the great impacts of the nuclear accident on the environment, economics, and politics. Obviously, the public does not accept this conclusion. In addition, the rationality and credibility of using these two probabilistic safety criteria (CDF and LERF/LRF) to indicate the safety level of NPPs has aroused broad skepticism because three major nuclear accidents have already occurred since 1979.
Probabilistic safety goals of main countries and organizations
In fact, there are different philosophies in the world with respect to safety goals. The United States focuses on mortality and direct monetary costs of on- or off-site consequences, and cost benefit analysis aspects are important (e.g., the monetary value of human life estimated up to several million US dollars). In contrast, in the European Union, a stringent safety goal implying the “practical” prohibition of large-scale evacuation and land contamination subsequent to an accident has been proposed for the fear of accidents, especially of severe accidents. To restore public confidence in nuclear energy, the safety goal of “practically eliminating the possibility of large releases of radioactive materials,” which was proposed by the European Union and later endorsed by the IAEA, has received much attention worldwide ( 35 ). The elimination of off-site evacuation has become a general requirement for Gen-IV reactors and fusion power plants ( 36 ). However, to ensure that these safety goals are more effective, it is very promising to achieve the physical elimination of these situations rather than only probabilistic elimination, yet the former remains a huge challenge.
Decision Making for Acceptable Risk Based on Social Rationality.
To answer the question, how safe is safe enough?, we need to return to the origin of the question that establishing safety goals is a social issue, not just a technical issue. It is essentially a form of decision making for acceptable risk ( 37 ) and requires the full participation of all parties concerned to find a balance among nuclear safety, economy, and public acceptance. However, nuclear safety goals are traditionally determined by the “experts” at regulatory authorities and nuclear enterprises, who make decisions by calculating and comparing the benefits and the expected loss of nuclear energy with those of other fields. These experts saw this technology-based approach as absolutely rational, and according to them, if the safety goals cannot be understood and accepted by the public, there must be something wrong with the public. However, experts are also boundedly rational; they are still influenced by their values, experiences, and social relations, and they are limited by their specialties: Their likelihood of making errors may be higher than that of the public. The decision-making process cannot be guaranteed to be objective and unbiased. Therefore, we proposed that for safety regulation in the unexpected second nuclear era, the idea of social rationality, which holds that every individual is boundedly rational but each has its own merits, should be integrated in decision making to coordinate technical and social viewpoints representing all walks of life ( 38 ) so that the established safety goals are widely understood and accepted ( Fig. 3 ).

Decision making for acceptable risk and values integration. Note: Various values should be integrated according to the principles of social development, industry characteristics, ethics and utility. Public values are mainly impacted by the public’s political and cultural background, potential losses, information acquisition, voluntary participation, and alternative options. Industry values are impacted by the industry’s political and cultural background, regulation requirements, accident characteristics, risk controllability and plant economics, and so on. Independent institute’s suggestions are based on current knowledge, NPP features, social impacts, and so on.
Values are important factors that affect the risk decision making of all stakeholders. Nuclear industries are concerned about how to maximize benefits while achieving safety goals, whereas the public is more concerned about the potential losses caused by nuclear accidents ( Fig. 3 ). This situation requires consensus on what types of criteria should be used to evaluate the consequences of a nuclear accident. Nuclear accidents would have serious impacts on aspects of physical and mental health as well as on the environment and economy ( 39 , 40 ). However, differences exist in public perceptions and acceptance of multidimensional risks. Therefore, a broad survey of public opinion needs to be performed to identify the diversity of their needs. Actions including proactive steps to motivate all stakeholders, open and transparent information sharing, and trying to satisfy multiple interest positions ( 41 ) should be enhanced to promote the public participation in the risk decision-making process. Meanwhile, to support the assessment of different impacts of accidents and ascertain the additional risk induced into total societal risk, future studies should be required to examine low-dose radiation effects ( 42 ), the migration of radionuclides in the environment ( 43 ), and psychological trauma assessment ( 44 ).
Wuli–Shili–Renli-Based Risk Control
After identifying the acceptable risk level of NPPs, how best to control risk through design and management is naturally the next issue to be analyzed.
The Evolution of Risk Control.
In the early stages of nuclear energy, nuclear reactors were built far away from where crowds might congregate to avoid impacts on the public. As nuclear power was commercialized ( 45 ), containment—considered to be infallible at that time—was designed by the nuclear community with the goal of containing radioactivity. However, the working group of the Atomic Energy Commission (AEC) noted in 1967 that a loss of coolant accident could cause a containment breach if the emergency core cooling system failed to operate ( 46 ). Then, a large amount of research was deployed on engineered safety features to reduce the probability and mitigate the consequences of core melting accidents. In the same year, the AEC proposed the concept of DiD, including three levels: prevention, protection, and mitigation. Hereafter, the possibility of severe accidents was demonstrated by the TMI accident, and severe accident management guidelines were developed to address beyond-design-basis accidents. Then, the Chernobyl accident confirmed the importance of off-site emergency planning ( 47 ). In 1999, the concept of DiD was regarded as a fundamental safety principle by the IAEA, which had formulated a construct comprising five different levels of defense and four physical barriers ( 48 ). The design requirements for DiD are derived by repeated application of the question, What if this barrier or safety feature fails? In the United States, the results of that process are documented in the regulations themselves, specifically in Title 10, Code of Federal Regulations, as the “prescriptive” requirements ( 49 ). The concept of DiD has matured, with much commonality in its understanding and application among nuclear industries around the world. For example, there were different constructions for NRC and IAEA, but they shared a logical consistency ( 50 ). In the Fukushima accident, all measurements to remove residual heat from the core failed due to a tsunami triggered by an earthquake, which eventually led to a large release of radioactive materials into the environment. Afterward, further considerations about the extreme external hazards were proposed for inclusion in DiD. In response to the question of how to control risk, the trend in research has been shifted away from “safety relying on remote locations and containments” to “reducing the probability and mitigating the consequence of accidents through redundant design and engineered safety features.” DiD as a fundamental safety principle has been gradually established. The implementation of DiD in some countries, such as the United States, China, The Netherlands, Mexico, and India, started moving toward a risk-informed and performance-based (RIPB) ( 50 , 51 ) approach from a prescriptive one ( 49 ). The RIPB concept was developed in an attempt to answer the questions of whereDiD is needed and how much DiD is adequate ( 52 ). Accordingly, passive-safe and fail-safe principles have been applied to enhance the safety critical systems of DiD ( 53 ), such as the passive decay heat removal system in AP1000. Based on the review above, we found that in the past there was still a lack of comprehensive thinking about nuclear safety design and management, and the approach of the past could not effectively integrate social and technical elements to reduce the adverse effect of uncertainty on safety. Currently, risk control focuses too much on the impact of technical factors on system safety and pays insufficient attention to social and technical interactions. On the one hand, the implementation of DiD increases system complexity ( 50 , 54 ). However, the safety of complex systems is increasingly subject to human and organizational factors ( 55 ). This issue has not been effectively addressed by human reliability assessment (HRA) techniques ( 54 , 56 ). On the other hand, as Reason pointed out, system operators and managers may be left blind to the increasingly degraded state of a system, and they may not recognize the degradation early enough if it is obscured by successive lines of DiD ( 57 ). This information asymmetry will shorten the intervening time window, which may lead to severe consequences ( 58 , 59 ).
In summary, in sociotechnical systems such as NPPs, risk control fundamentally relies on the comprehensive effect of social factors, technical factors, and their interaction. Therefore, nuclear safety should be achieved through these three original aspects ( 60 ).
Wuli–Shili–Renli-Based Thought Achieves Reasonable Control of Nuclear Risk.
Wuli–Shili–Renli ( 60 ), originally proposed to manage sociotechnical systems, is adopted to control nuclear risk to address social and technical elements in a theoretically informed and systematic way ( Fig. 4 ).

Comprehensive effect of Wuli–Shili–Renli on safety. Note: Wuli–Shili–Renli philosophy is a Chinese expression for an integrated framework of systems thinking, which consists of 3D aspects in a sociotechnical system: social factors (Renli), technical factors (Wuli), and social and technical interactions (Shili).
Although human factors and information symmetry are very important for safety achievement, disruptive improvement in nuclear safety may be more likely to arise from technological innovations. For example, DiD ensures the safety of nuclear reactors mainly by additional safety measures. Relatively speaking, innovative reactor designs, seeking a breakthrough from physical technology and eliminating potential hazards from the source, are important orientations for nuclear safety development. To ensure nuclear safety from the origin, research focus has shifted from “relying on complex design and engineered safety features” to “improving the design of the reactor itself” and hence reducing the impact of uncertainty on DiD. For example, these features include minimizing the production of radioactive materials, achieving self-control of reactivity based on negative feedback, and substituting water with inherently safe coolant, which is chemically inert and can be operated under normal or low pressure.
Accidents generally result from a breakdown in the flow and interpretation of information, and all of the accident factors, such as states of technical systems, human, energy, culture, and management can be represented by information ( 61 ). For the acquisition and utilization of safety-critical information, many novel safety models and methods have been proposed. For example, a novel safety principle termed “observability-in-depth” (OiD) is proposed as a supplement to traditional DiD. The core idea is as follows: A set of technical, operational, and organizational provisions are designed to enable the monitoring and identification of emerging hazardous conditions and accident pathogens in real time and over different time scales. OiD also requires monitoring the conditions of all confinement barriers that implement DiD ( 62 ). OiD not only improves the traditional DiD principle but is also of great significance to the implementation of online risk monitoring in the future ( 59 ). Of course, the successful deployment of OiD relies on further developing types of sensors adapted to rigid environments, such as high temperature, high pressure, and high radiation. Collection and analysis techniques that can be applied to huge amounts of data should be studied, such as artificial intelligence (AI) ( 63 ) and big data ( 64 ). In addition, OiD currently considers only the information transferred from technical systems to humans, and we need more research on the interactions among human and between human and technical systems, such as information-based accident analysis and preventing measures.
Human and organizational performance in normal operations and accident management have to be improved to better address the uncertainty of plant conditions. Resilience theory, which has been widely recognized in recent years, represents a new way of thinking about safety. Resilience theory advocates enhancing the emergent property generated in a recursive management process of an engineering system to cope with the threats to safety induced by real-world complexity and to respond to and recover from some unexpected external events at early stages, by minimizing their impacts on the stability of systems ( 65 , 66 ). Resilient perspectives focus on how individuals and organizations adjust their performance to unexpected events when DiD is challenged. Unlike most HRA methods that aim to predict the performance of an “average crew,” resilience engineering pays more attention to the differences in the activities of crews on a microlevel ( 67 ) and the specific interactions among operators, teams, resources, technology, and the circumstances of the scenario ( 68 , 69 ). Accordingly, it is an important move from improving system reliability to emphasizing system resilience in the risk management of complex systems. Resilience engineering can be a strong complement of risk analysis. To achieve safety by improving human and organizational performances, the combination of DiD, safety culture, and resilience engineering should be enhanced alongside deep research on the theoretical and ethical aspects of resilience. Additionally, future studies should focus on the quantitative methodology for precisely estimating the resilience level of sociotechnical systems. More case studies should be carried out to accumulate staff and organizational data on nuclear design, operation, and so on, especially at the managerial and institutional levels.
Technical Humility-Based Risk Assessment
The basic idea in determining reactor safety is that if a nuclear reactor can demonstrably meet acceptable risk level and maintain a sufficient safety margin under the disturbance of uncertain events, the reactor is deemed safe ( 70 ). Furthermore, building an NPP is only permitted when approved by regulatory authorities.
The Evolution of Risk Assessment.
In risk assessment, accidents have been considered from the perspective of a specific event to that of more comprehensive initiating events, and the evaluation method was developed from a deterministic method into a probabilistic or hybrid method. In the early stages, risk assessment for NPPs was based on the concept of a “maximum credible accident” (MCA), a specific accident with a potentially hypothetical hazard that cannot be exceeded by any other supposedly credible accident during the lifespan of a reactor ( 71 ). However, demonstrating reactor safety based on MCA was inadequate due to great uncertainties in the selection of this accident. MCA was later replaced by a set of postulated accidents, which were design basis accidents (DBAs). Accidents with severity beyond that of DBAs were thought to be incredible. Therefore, if a plant could handle DBAs, its safety was considered to be sufficiently proven. So-called deterministic safety analysis was gradually developed, in which a single failure criterion or operational experiences were applied in the selection of DBAs, and the effectiveness of physical barriers and safety systems was evaluated by conservative assumptions ( 70 ).
Before the TMI accident, the Reactor Safety Study (WASH-1400 in 1975) based on PRA showed that the realistic threats to the public were mainly from core melting accidents. Instead of receiving sufficient attention, this study became subject to major doubt ( 72 ). The TMI accident showed that multiple failures may cause core melting accidents much worse than those of DBAs, which confirmed the finding of WASH-1400 and directed much attention to the application of PRA. Hence, the WASH-1400 became a major milestone in the history of probabilistic methods ( 70 ). Decision makers began to focus on the negative insights provided by PRA ( 73 ), that is to say, some new system faults were revealed. Later, with ongoing application of PRA, decision makers began to pay greater attention to its positive insights (i.e., that some overly conservative requirements could be relaxed).
In recent years, PRA has gained wide application in many countries. According to the way that countries have approached the development of the PRA standards and guidance, PRA can be mainly divided into four broad categories ( 34 ): 1) National standards and guidance have been or are being developed (e.g., the United States and India); 2) high-level requirements and guidance are defined by the regulatory body (e.g., the United Kingdom and Korea); 3) no specific national standards or guidance have been defined and the methods used have been developed by the utilities and accepted by the regulatory body (e.g., France and Sweden); and 4) no specific standards or guidance have been developed with a high reliance on what has been produced elsewhere (e.g., Italy). Despite the use of PRA by a licensee has been not a legal requirement in some countries, it still plays an important role in the safety improvement of NPPs. This is the case in France, where the fleet of operating reactors is highly standardized and its assessment is based essentially on a deterministic approach and PRA is not required by the safety authority. However, the utilities have developed their own methods and guidance, and this has led to important improvements in the quality of the PRA.
It should be noted that current deterministic assessment and PRA tend to overemphasize technical systems with a strong belief that if the technologies work the plant is safe. Moreover, these methodologies are mainly based on reductionism, which breaks the system down into smaller parts to make it manageable. However, working with each aspect separately cannot reflect the dynamic interactions of system elements and cannot give the full picture of the system. Therefore, existing risk assessment theories for NPPs need the breakthrough of a new methodology.
Technical Humility-Based Risk Assessment.
A risk assessment methodology based on technical humility is proposed with coupling of systems thinking and social mechanisms. Systems thinking views safety as an emergent property and analyzes the dynamic and interactive characteristics in a system’s evolution, as well as the coupling relationships between social and technical factors, to provide a full picture of the system. Therefore, the risk assessment of NPPs should shift its approach from reductionism to systems thinking in the future. However, the existing risk assessment techniques based on systems thinking still face great challenges, and even systems science itself needs improvements at the theoretical level ( 74 ). It is our opinion that at the current stage we can use dynamic reliability methods developed on the basis of probabilistic dynamics theory and discrete dynamic event trees to model and analyze systems with regard to their dynamic characteristics. Dynamic reliability techniques are relatively mature and have been applied to the dynamic PRA of subsystems of NPPs. Improvements in size limits and calculation speed should be made to meet the requirements of plant-scale applications in the future ( 75 , 76 ). Regarding interactive features, we may refer to the Systems-Theoretical Accident Model and Process, the Risk Management Framework of Jens Rasmussen ( 56 , 77 – 79 ), and so on. However, these approaches are only qualitative frameworks and cannot carry out quantitative analysis and application ( 80 , 81 ). Holism and reductionism need to be further integrated: Interactions reflect holism, and reductionism embodies technical solvability. The key point is to determine the balance between holism and reductionism. The major development trend in nuclear risk assessment in the future for systems methods will be deeply integrated with AI ( 63 , 82 – 87 ), big data ( 88 ), dynamic uncertain causality graphs ( 89 ), and other new technologies, with the goal of predicting the faults of complex systems.
However, due to the inherent limitations of human cognition, uncertainty always exists in theories, methods, and techniques. Hence, we should know when to direct our attention to solutions beyond risk assessment techniques, that is to say, to social mechanisms. From a social perspective, we should treat risk assessment correctly and respect the public’s open and fair comments on the different risk assessment models (including terminologies, assumptions, and results) instead of neglecting them in the inaccessible computer codes and hidden discussions of experts. Technical humility herein refers to methods, or better yet an institutionalized thinking habit, that try to come to perceiving the ragged fringes of human understanding—the uncertain, the unknown, the uncontrollable, and the controllable ( 90 ). Technical humility recognizes the insufficiencies of risk assessment, and we should turn from technical optimism to humble practice and devote enough efforts to designing social mechanisms to address uncertainty which requires different expert knowledge and different forms of participation between decision makers, experts, and the public that are considered needful in the governance structures of high modernity ( 91 ). In the face of uncertainty, building the capacity of risk management must be a multidisciplinary activity that involves psychology, management science, political theory, and so on in addition to risk assessment.
Risk Communication Based on Objective and Subjective Risk
The purpose of developing NPPs is ultimately to serve the public. Unfortunately, public skepticism of nuclear power, heightened by the three major nuclear accidents, has hindered the development of nuclear power. Accordingly, risk communication has become an indispensable task for the nuclear industry.
The Evolution of Risk Communication.
In the early days, the development of nuclear energy was mostly related to the will of countries, and nuclear reactors were built far away from where crowds might congregate. At that time, the public had little knowledge of nuclear power and no strong desire to learn about it ( 92 ). Therefore, public communication was either unnecessary or just a prior work for nuclear power projects. Only when the TMI accident eroded the public’s faith in nuclear power was public communication finally taken seriously, but it was only used to familiarize the public with nuclear technology to make them accept it ( 93 ). Therefore, the function of public communication was one-way: informing, persuading, and educating the public at that time. It was difficult to establish real trust because the two sides of the communication were unequal in status.
This one-way communication overemphasized the dissemination of objective risk, such as science popularization, while ignoring the subjective risk. Note that the objective risk here refers to risk measurement by experts and the subjective risk denotes perceived risk of the public. People often rely on their intuition to perceive and judge risks in real life, which results in a great difference between objective risk and subjective risk. In addition, false information and fake news also have impacts on public perception of risk. For example, some media exaggerated the consequences of nuclear accidents, while some nuclear industries overstated the safety of nuclear energy. In the latter case, the uncertain results of risk assessment were generally propagated as determined results, such as that a nuclear accident would happen only once in a million years. However, the Fukushima nuclear accident revealed fragile public acceptance of nuclear energy. In fact, as early as 20 y ago, people had realized the importance of risk communication and that a 2-way interactive process among decision makers, experts, and the public should be involved in effective risk communication ( 94 ). However, this process has not been well implemented in some countries; for example, China’s nuclear policy making relies too heavily on closed expert panels and the public is generally removed from this closed policy-making community ( 95 ).
At present, public participation in nuclear power projects has reached unprecedented levels of importance. Worldwide, antinuclear activities have stopped many nuclear reactor projects, even changing some countries’ policies on nuclear energy development. Thus, risk communication has become a critical issue. It should be noted that socioeconomic and cultural differences among countries are large, and similar means for communication are not always effective in all countries. For example, when using social media to conduct risk communication, China is more prone to have a rigid language and adopt an evasive attitude toward some issues of public concern, sometimes leading to unexpected results and even strengthening some of the public’s dissatisfaction. In contrast, the United States prefers to express the language based on the information category and fully consider the public psychology, achieving relatively good communication effects and overall positive evaluation ( 96 ).
Public-Centered Risk Communication.
The importance of subjective risk should be fully recognized. Risk communication should be embedded into every phase of risk management, which is an interaction platform among interested parties. The decision making of the nuclear industry should be an open and transparent process to ensure that the public trusts the regulators and nuclear industry. After the Fukushima nuclear accident, public acceptance of nuclear power decreased dramatically in 42 countries, and the not-in-my-backyard syndrome was notable ( 97 ). In some countries, the credibility of regulation was even challenged dramatically. To cope with these dilemmas, research institutes independent of regulators, industries, and the public should be established, and they can serve as a bridge to enhance the credibility of regulation and the transparency of information to avoid falling into the Tacitus trap ( 98 ). Any safety issue or accident occurring in the nuclear industry should be reported promptly, and the public should be kept informed without any concealing of information. In addition, another premise of risk communication is to continuously strengthen the research on risk perception to help us understand the public judgments of risk and to increase the effectiveness of policies ( 99 ). In the unexpected second nuclear era, regulators and nuclear industries should change their moralistic attitudes and establish effective mechanisms for public-centered 2-way communication that can build and maintain sufficient trust in the long term.
Moreover, radiation risk should be communicated correctly, without neglecting its inherent uncertainties. In fact, the public’s rejection of NPPs originated from radiation fears. During recent decades, the linear no-threshold (LNT) hypothesis, based on the assumption that, in the low dose range, radiation doses greater than zero will increase the risk of excess cancer and/or heritable disease in a simple proportionate manner, has been considered a proven theory by public opinion, mass media, regulatory bodies, and even many scientists, and this misperception has led to excessive radiation fears. It has been indicated that harms to the public with regard to radiation fears are much more prevalent than those from radiation itself. Finally, it turns out to be an unconservative policy and greatly hinders the process of risk communication ( 100 ). For example, there were no prompt fatalities as a result of radiation in the Fukushima accident, but it resulted in public psychological uneasiness in Japan and its neighboring countries and in tremendous economic losses ( 101 ). In fact, recent studies on some biological experiments and epidemiological practices have not supported the LNT hypothesis ( 102 – 104 ). Accordingly, low-dose radiation biology should be further studied in the future, and in particular research and development on the LNT hypothesis as well as other competing low-dose radiation models. If it turns out that no-threshold models are incorrect, a practical threshold concept is suggested to be introduced in radiation protection, namely, defining a specific dose level. If the exposure is lower than that level, there will be no observable cancer or genetic effect; establishing this threshold would be helpful in eliminating radiation fears.
Since the beginning of nuclear power there has been no doubt about its value. However, nuclear power is still far from being widely accepted as sustainable energy. In the unexpected second nuclear era, some new realities have emerged with the growth of nuclear energy in developing countries, with more potential risk factors. Nuclear safety is playing an important role in the development of nuclear energy. We have rethought nuclear safety from the sociotechnical perspective and clarified its nature of uncertainty and impact on humans, both physically and mentally. We have also pointed out future trends in nuclear safety philosophy based on a historical review of nuclear safety research. 1) Social rationality-based risk decision making: More attention should be paid to the consequences of psychological trauma, environmental contamination, and so on, rather than to the consequences of physical harm, as was done in the past. To support decision making regarding acceptable risk, the idea of social rationality should be applied to integrate the social and technical elements of the system. 2) Wuli–Shili–Renli-based risk control: The comprehensive effect of 3D factors, Wuli–Shili–Renli, should be considered in risk control. Entity-centered safety theory is being replaced by relationship-centered safety theory. The emphasis on system reliability has changed to an emphasis on the improvement of system resilience. Studies of OiD and resilience engineering should be enhanced to complement the DiD philosophy, while breakthroughs in nuclear reactor physics and design are needed to reduce the impact from uncertainties and achieve “built-in” safety. 3) Technical humility-based risk assessment: systems thinking and social mechanisms should be coupled in risk assessment. Systems thinking should be substituted for reductionism, and advanced technologies such as AI and big data should be integrated to realize more comprehensive and realistic assessment. Besides recognizing the insufficiencies of risk assessment, we should shift from technical optimism to humble practice. More attention and resources should be devoted to designing social mechanisms to address uncertainties. 4) Public-centered risk communication: Attention must be paid not only to objective risk but also subjective risk. Public participation should be strengthened in the decision-making and regulatory processes of nuclear power development. In addition, we should reinforce the independence of nuclear regulation and establish risk communication mechanisms centering on humans, especially for developing countries. Meanwhile, the LNT hypothesis needs to be further studied to alleviate the public’s unnecessary fear of radiation and ultimately build and maintain sufficient trust in the long term.
Note that the proposed approaches of improving nuclear safety from a sociotechnical perspective could be useful not only for existing nuclear suppliers but also for newcomers with underdeveloped infrastructure. In particular for newcomers, the top-level design of nuclear safety governance system needs to be established as a first step for the implementation of these approaches, taking into account all mentioned aspects related to how nuclear safety is defined, controlled, assessed, and communicated. Technical and management assistance from nuclear suppliers and the international organizations like IAEA would absolutely facilitate this design process.
Acknowledgments
We thank all the members of the FDS (Frontier Development of Science) Team, as well as the contributors and authors of references cited in this work. This work is supported by the Nuclear and Radiation Safety Regulation Program (JD201842).
The authors declare no conflict of interest.
This article is a PNAS Direct Submission.
Inside the world's first reactor that will power Earth using the same nuclear reactions as the Sun
 that aims to demonstrate the industrial feasibility of nuclear fusion energy.")
Euronews Next goes behind the scenes at the world’s largest nuclear fusion device attempting to harness the same reaction that powers the Sun and stars.
In the heart of Provence, some of the brightest scientific minds on the planet are setting the stage for what is being called the world’s largest and most ambitious science experiment.
"We are building arguably the most complex machine ever designed," confided Laban Coblentz.
The task at hand is to demonstrate the feasibility of harnessing nuclear fusion - the same reaction powering our Sun and stars - at an industrial scale.
- Fusion breakthrough is a milestone for future of clean power, scientists say
To do this, the world’s largest magnetic confinement chamber, or tokamak, is under construction in the south of France to generate net energy.
The International Thermonuclear Experimental Reactor (ITER) project agreement was formally signed in 2006 by the US, EU, Russia, China, India, and South Korea at the Elysée Palace in Paris.
There are now more than 30 countries collaborating on the effort to build the experimental device, projected to weigh 23,000 tonnes and withstand temperatures of up to 150 million°C when complete.
"In a way, this is like a national laboratory, a big research institute facility. But it's the convergence of the national laboratories, really, of 35 countries," Coblentz, ITER’s head of communications, told Euronews Next.
How does nuclear fusion work?
Nuclear fusion is the process by which two light atomic nuclei fuse to form a single heavier one, generating a massive release of energy.
In the case of the Sun, hydrogen atoms at its core are fused by the sheer amount of gravitational pressure.
We've run into challenges before just simply due to the complexity and the multitude of first-of-a-kind materials, first-of-a-kind components in a first-of-a-kind machine.
Meanwhile, here on Earth, two main methods are being explored to generate fusion.
"The first, you might have heard at the National Ignition Facility in the US," Coblentz explained.
"You take a very, very tiny bit - the size of a peppercorn - of two forms of hydrogen: deuterium and tritium. And you shoot lasers at them. So, you're doing the same thing. You're crushing pressurisation as well as adding heat and you get an explosion of energy, E = mc². A little amount of matter is converted to energy".
ITER’s project is focused on the second possible route: magnetic confinement fusion.
"In this case, we have a very large chamber, 800 m³, and we put a very tiny amount of fuel -2 to 3 g of fuel, deuterium, and tritium - and we get it up to 150 million degrees through various heating systems," Laban said.
"That is the temperature at which the velocity of these particles is so high that instead of repelling each other with their positive charge, they combine and fuse. And when they fuse, they give off an alpha particle and they give off a neutron".
- Energy crisis in Europe: Which countries have the cheapest and most expensive electricity and gas?
In the tokamak, the charged particles are confined by a magnetic field, except the highly energetic neutrons which escape and hit the wall of the chamber, transfer their heat and thereby heat water running behind the wall.
Theoretically, energy would be harnessed by the resulting steam driving a turbine.
"This is, if you like, the successor of a long line of research devices," Richard Pitts, the section leader of ITER’s science division, explained.
"The field has been investigating tokamak physics for around 70 years, since the first experiments were designed and built in Russia in the 1940s and 50s," he added.
According to Pitts, early tokamaks were small, tabletop devices.
"Then bit by bit, they get bigger and bigger and bigger because we know - from our work on these smaller devices, our scaling studies from going small to bigger to bigger - that in order to make net fusion power out of these things, we need to make one as big as this," he said.
- Europe’s energy crisis is boosting green hydrogen. Is it finally a real alternative?
Advantages of fusion
Nuclear power plants have been around since the 1950s exploiting a fission reaction, whereby the atom is split in a reactor, releasing a massive amount of energy in the process.
Fission has the clear advantage of already being the established tried and tested method, with over 400 nuclear fission reactors in operation worldwide today.
But while nuclear disasters have been a rare occurrence in history, the catastrophic meltdown of reactor 4 at Chernobyl in April 1986 is a potent reminder that they are never entirely risk-free.
Moreover, fission reactors also have to contend with the safe management of vast amounts of radioactive waste, which is typically buried deep underground in geologic repositories.
By contrast, ITER notes that a fusion plant of a similar scale would be generating power from a much smaller amount of chemical inputs, just a few grams of hydrogen.
"The safety effects are not even comparable," Coblentz noted.
"You've only got 2 to 3 g of material. Moreover, the material in a fusion plant, deuterium and tritium, and the material coming out, non-radioactive helium and a neutron, are all harnessed. So there is not a leftover, so to speak, and the inventory of radioactive material is extremely, extremely tiny," he added.
- US scientists announce major nuclear fusion breakthrough that could 'revolutionise the world'
Setbacks to the ITER project
The challenge with fusion, Coblentz stresses, is that these nuclear reactors remain extremely difficult to build.
"You try to take something up to 150 million degrees. You try to make it the scale that is needed and so forth. It's just a difficult thing to do," he said.
Certainly, the ITER project has struggled with the complexity of this gargantuan undertaking.
The original timeline for the ITER project set 2025 as a date for the first plasma, with full commissioning of the system bookmarked for 2035.
But component setbacks and COVID-19-related delays have led to a shifting timeline for system commissioning and a ballooning budget to match.
The initial cost estimate for the project was €5 billion but has grown to over €20 billion.
"We've run into challenges before just simply due to the complexity and the multitude of first-of-a-kind materials, first-of-a-kind components in a first-of-a-kind machine," Coblentz explained.
- World-first nuclear fusion plant could generate carbon free energy by 2040, UK government claims
One significant setback involved misalignments in the welding surfaces of segments of the vacuum chamber manufactured in South Korea.
"The ones that have arrived have arrived with enough of a nonconformity in the edges where you weld them together that we are having to redo those edges," Coblentz said.
"It's not rocket science in that particular case. It's not even nuclear physics. It's just machining and getting things to an incredible degree of precision, which has been difficult," he added.
Coblentz says the project is currently engaged in a process of resequencing, in the hopes of sticking as close as possible to their 2035 target for the start of fusion operations.
"Rather than focusing on what our dates were before a first plasma, first test of the machine in 2025, and then a series of four stages to get to fusion power initially in 2035, we'll just skip the first plasma. We'll make sure that that testing gets done in another way so that we can stick as much as possible to that date," he said.
- Electricity-generating windows? Swiss scientists design more efficient transparent solar panels
International collaboration
As far as international collaborations go, ITER is something of a unicorn in how it has withstood the headwinds of geopolitical tensions between many of the nations engaged in the project.
The longer that we wait for fusion to arrive, the more we need it. So the smart money is: get it here as fast as possible.
"These countries are not obviously always ideologically aligned. If you look at the feature flags on the work site by Alphabet, China flies next to Europe, Russia flies next to the United States," Coblentz noted.
"For those countries to make a 40-year commitment to work together, there was no certainty. There will never be a certainty that there were not going to be some conflicts".
Coblentz puts the relative health of the project down to the fact that getting nuclear fusion up and running is a common, generational dream.
"That's what brings that strength together. And it's why it has survived the current sanctions that Europe and others have on Russia in the current situation with Ukraine," he added.
- Could floating solar panels be a solution to both the climate crisis and soaring energy prices?
Climate change and clean energy
Given the scale of the challenge presented by climate change, it’s little wonder that scientists are racing to find a carbon-free energy source to power our world.
But plentiful fusion energy supply is still a long way off, and even ITER admits that their project represents the long-term answer to energy concerns.
In response to the notion that fusion will come too late to help combat the climate crisis in a meaningful way, Coblentz asserts that fusion power could have a role to play further into the future.
"If we really have sea level rise to the extent that we start to need the energy consumption to move cities? If we begin to see energy challenges on that scale, it becomes really obvious the answer to your question," he said.
"The longer that we wait for fusion to arrive, the more we need it. So the smart money is: get it here as fast as possible".
For more on this story, watch the video in the media player above.
You might also like

Bluesky: Jack Dorsey's new social platform now open for anyone to join

Scientists develop antivenom for snake bites with the help of horses
, industry experts say.")
Schoolchildren should learn about AI, tech insiders say

South Korea to develop next-gen nuclear reactors
!{Model.Description}

"Competition for next-generation nuclear reactors such as small modular reactors (SMRs) and non-light water reactors is intensifying worldwide as market demand for nuclear power generation diversifies," the ministry said. While the government has been promoting the securing of core technologies for the development of next-generation nuclear reactors, “active participation and investment from the private sector is also necessary" in order to “flexibly respond to rapidly changing market demand and successfully utilise the results of research and development so far”.
The MOU is expected to serve as a foundation for disseminating the results accumulated through government-led research and development to the private sector and promoting private-led technology development, demonstration and commercialisation.
The government and companies confirmed their commitment to developing next-generation nuclear reactors, including the Korean-designed SMART SMR, molten salt reactors, high-temperature gas reactors and sodium-cooled fast reactors. They agreed to continue close cooperation for joint technology development, technology transfer, acquisition of licences, and human resource training. A public-private consultative body is also expected to be put in place to implement the MOU.
"In order to become a global leader in the nuclear energy market, which is rapidly being reorganised centring on next-generation nuclear reactors, the role of private companies that can respond quickly and flexibly is paramount," said First Vice Minister of Science & ICT Lee Chang-yoon. "Based on the public-private cooperation MOU, we will spare no effort in providing the necessary support for our companies to develop into top-tier next-generation nuclear reactor companies, such as transferring technology owned by government-funded research institutes, supporting licensing, and establishing a research association.”
In February, South Korean President Yoon Suk Yeol pledged to spend more than KRW4,000bn ($3bn) on nuclear energy research and development projects during his five-year term, which ends in 2027. This affirmed his commitment in July 2022 to reverse the nuclear phase-out policy of his predecessor, President Moon Jae-in. He set a goal of planning nuclear power projects that would earn the domestic nuclear energy industry a total of KRW3,300bn and agreed to extend KRW1,000bn in special loans for wider nuclear industry support.
Image: Commemorative photo of the ‘Next-generation nuclear reactor development public-private cooperation MOU signing ceremony’ (courtesy of MSIT)
- Terms and conditions
- Privacy Policy
- Newsletter sign up
- Digital Edition
- Editorial Standards

IMAGES
VIDEO
COMMENTS
This paper reviews the smallness, modularity and reactor-design aspects of emerging small modular reactors (SMRs). ... An example of this is the Fixed Bed Nuclear Reactor (FBNR), a PWR 218 MWt, ... SMRs more familiar and less mysterious to people, hopefully increasing their social acceptability in the same manner research reactors were part of ...
NEICA supports the deployment of advanced reactors and develops research reactors based on fast neutrons to test the fuel and materials of advanced reactors; NELA aims to advance the research and development of advanced nuclear reactor technology and consolidate the American global leadership position in the field of civilian nuclear energy [12 ...
International Journal of Advanced Nuclear Reactor Design and Technology is a peer-reviewed, open access journal dedicated to creating a platform for sharing and exchanging the latest research results for the peaceful use of nuclear energy. The Editors welcome high-quality original research articles, technical notes, and review articles involving all aspects of nuclear science and technology.
The TCV 1, 34, shown in Fig. 1, is a research tokamak at the Swiss Plasma Center, with a major radius of 0.88 m and vessel height and width of 1.50 m and 0.512 m, respectively. TCV has a flexible ...
Research reactor power ratings are designated in megawatts and their output can range from zero (e.g., critical assembly) up to 200 MW(th), compared with 3000 MW(th) (i.e., 1000 MW(e)) for a typical large power reactor unit. Research reactors For more than 60 years, research reactors have been providing a source of neutrons for a
The purpose of this paper is to present a model for nuclear safety management in an operational organization of a nuclear power plant, based on the HTOE (human, technology, organization, and ...
reactor) in the 1970s, during the research and de velopment project of a nuclear reactor for use in submarines. The result was the PWR design named CNP-300, 1-loop PWR, and 300 MWe electrical
Much current research focuses on development of safe, competitive, and sustainable nuclear energy technologies in a post Fukushima world. This special issue of Energies focuses on advances with the potential to transform contemporary reactor technologies or advanced nuclear energy systems and fuel cycles. Technologies considered in this special ...
This publication presents an overview of research reactor capabilities and capacities in the development of fuels and materials for innovative nuclear reactors, such as GenIV reactors. The compendium provides comprehensive information on the potential for materials and fuel testing research of 30 research reactors, both operational and in ...
In particular, integral pressurized water reactors (iPWRs) exhibit fuel costs 15% to 70% higher than large light water reactors, as per the 2014 nuclear fuels market data [15]. Thermodynamic ...
Nuclear energy is presented as a real option in the face of the current problem of climate change and the need to reduce CO2 emissions. The nuclear reactor design with the greatest global impact throughout history and which has the most ambitious development plans is the Pressurized Water Reactor (PWR). Thus, a global review of such a reactor design is presented in this paper, utilizing the ...
reactors, but its capacity has been nearly flat for the past three decades.1 High capital costs, low electricity demand growth, and competition from cheaper sources of electricity, such as natural gas and renewables, have dampened the demand for new nuclear power plants and led to the permanent shutdown of existing reactors. Thirteen nuclear ...
Research paper. A historical review and analysis on the selection of nuclear reactor types and implications to development programs for advanced reactors; A Japanese study ... In recent years, the development of innovative nuclear reactor technologies has been widely advocated in the United States and other leading countries, with governments ...
The researches on nuclear reactor thermal-hydraulics have achieved outstanding progresses in the past decades. In recent years, basic research on multiphase flow dynamics and corresponding measurement technology, as well as preliminary research on Gen IV reactors based on experiments and simulations are attracting more and more attention. However, the inside complicated physics and outside ...
January 15, 2021. 1. Introduction. Nuclear fusion is often assumed to be the preferred source of baseload energy in a far-future energy mix; i.e. that once the technology is demonstrated, fusion's advantages make it a clear choice for low-carbon energy generation - assuming it is cost-competitive [1].
Unlike other research reactors, Fast Breeder Test Reactor (FBTR) is an SFR and has a steam production circuit with a turbine generator for producing electricity. It is representative of a nuclear power plant and has given the confidence in developing a prototype fast breeder reactor. 4.2 Choice of nuclear power reactor type for India
Molten Salt Reactors (MSRs) and thorium-based nuclear technologies have emerged as promising solutions to address the pressing global challenges of climate change, energy security, and nuclear ...
Research on the fourth generation reactors is needed for the realisation of this development. For the fast nuclear reactors, a substantial research and development effort is required in many fields—from material sciences to safety demonstration—to attain the envisaged goals. Fusion provides a long-term vision for an efficient energy production.
Research reactors, nuclear reactors used for research. Many of the world's nuclear reactors are used for research and training, materials testing, or the production of radioisotopes for medicine and industry. These are much smaller than power reactors or those propelling ships, and many are on university campuses. There are about 220 such reactors operating.
Nuclear safety research started with the Fermi reactor, where multiple redundant safety systems played important roles in keeping the whole operation under control. However, in the unexpected second nuclear era, the concept of nuclear safety has gone far beyond technology, as nuclear safety has been recognized as a prevalent social issue more ...
The last such meeting was the International Conference on Research Reactors: Addressing Challenges and Opportunities to Ensure Effectiveness and Sustainability, Buenos Aires, Argentina, November 2019. Since the 1950s, research reactors have been centres of innovation and development for nuclear science and technology programmes around the world.
1. Introduction. In a memo from the 1950s entitled "Paper reactors, real reactors" (Rickover, 1953) Admiral Hyman Rickover, the founding father of the American naval nuclear propulsion and nuclear energy programs, enumerated the differences between a practical designer who is working on a reactor that will be built and an academic designer working on a paper reactor. 1
But while nuclear disasters have been a rare occurrence in history, the catastrophic meltdown of reactor 4 at Chernobyl in April 1986 is a potent reminder that they are never entirely risk-free.
Holtec applied for financial support through the Civil Nuclear Credit Program, a $6 billion fund designed to help preserve the existing U.S. reactor fleet and save thousands of high-paying jobs ...
This paper presents the state-of-the-art deep-learning application in the nuclear reactor safety analysis and the critical issues and challenges with the model. This work also proposes robust solutions to the identified challenges, toward a safe and efficient reactor development and safety analysis.
This affirmed his commitment in July 2022 to reverse the nuclear phase-out policy of his predecessor, President Moon Jae-in. He set a goal of planning nuclear power projects that would earn the domestic nuclear energy industry a total of KRW3,300bn and agreed to extend KRW1,000bn in special loans for wider nuclear industry support.
The interest toward Small Modular nuclear Reactors (SMRs) is growing, and the economic competitiveness of SMRs versus large reactors is a key topic. Leveraging a systematic literature review, this paper firstly provides an overview of "what we know" and "what we do not know" about the economics and finance of SMRs. Secondly, the paper ...